Dynamic object removal method based on point cloud features and Monte Carlo extension method
An expansion method, point cloud technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of low measurement accuracy and efficiency, and achieve the effect of improving accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
[0018] A method for removing dynamic objects based on point cloud features and Monte Carlo extension method according to an embodiment of the present invention, comprising the following steps:
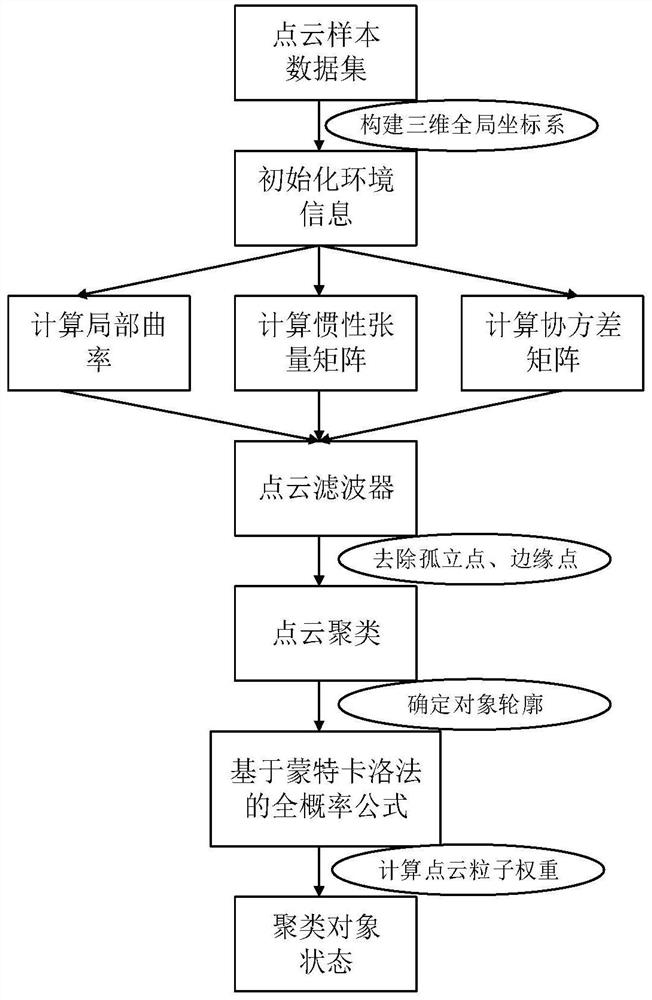
[0019] Step 1: Construct a point cloud data sample dataset, construct a three-dimensional global coordinate system, and initialize environmental information. In order to prevent insufficient segmentation in the vertical direction caused by the height of part of the collected point cloud data being too high or too low, the points exceeding a certain threshold in the vertical direction are deleted. In the three-dimensional space coordinate system, the real-time point cloud data is projected onto the 2D grid map on the XY plane (retaining the height value and reflection intensity information).
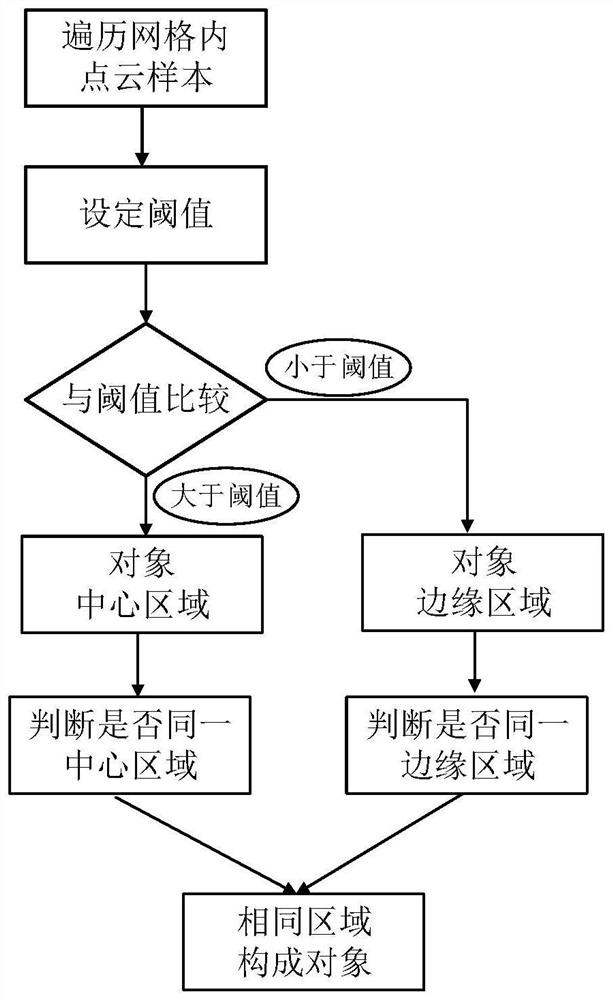
[0020] Step 2, extract point cloud data in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More