

Industrial robot with multiple forms and multiple walking modes
A technology of industrial robots and walking methods, which is applied in motor vehicles, transportation and packaging, etc., can solve the problems of high braking performance and stability requirements of serving robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
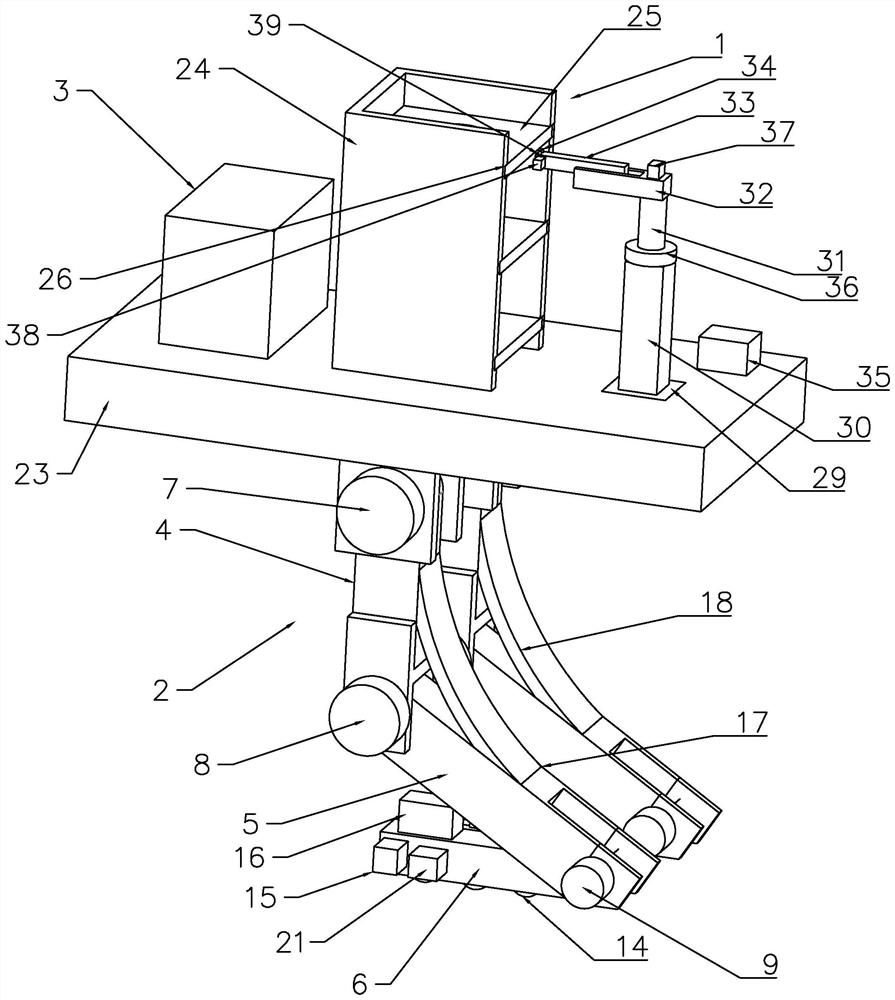
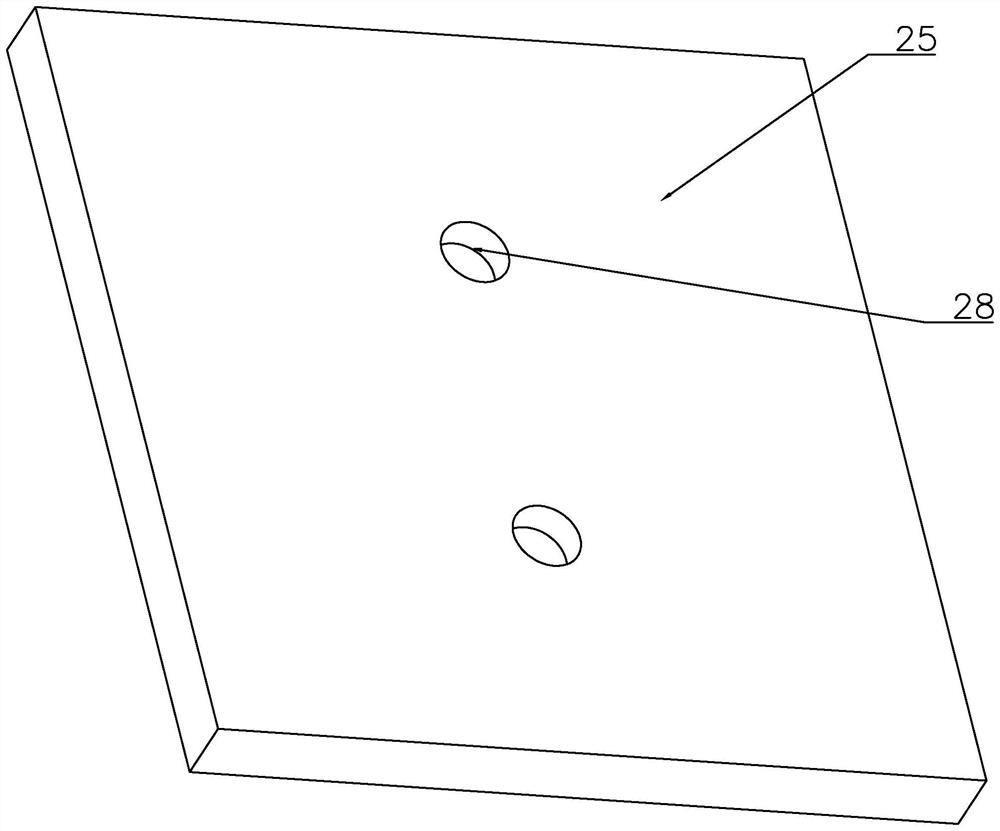
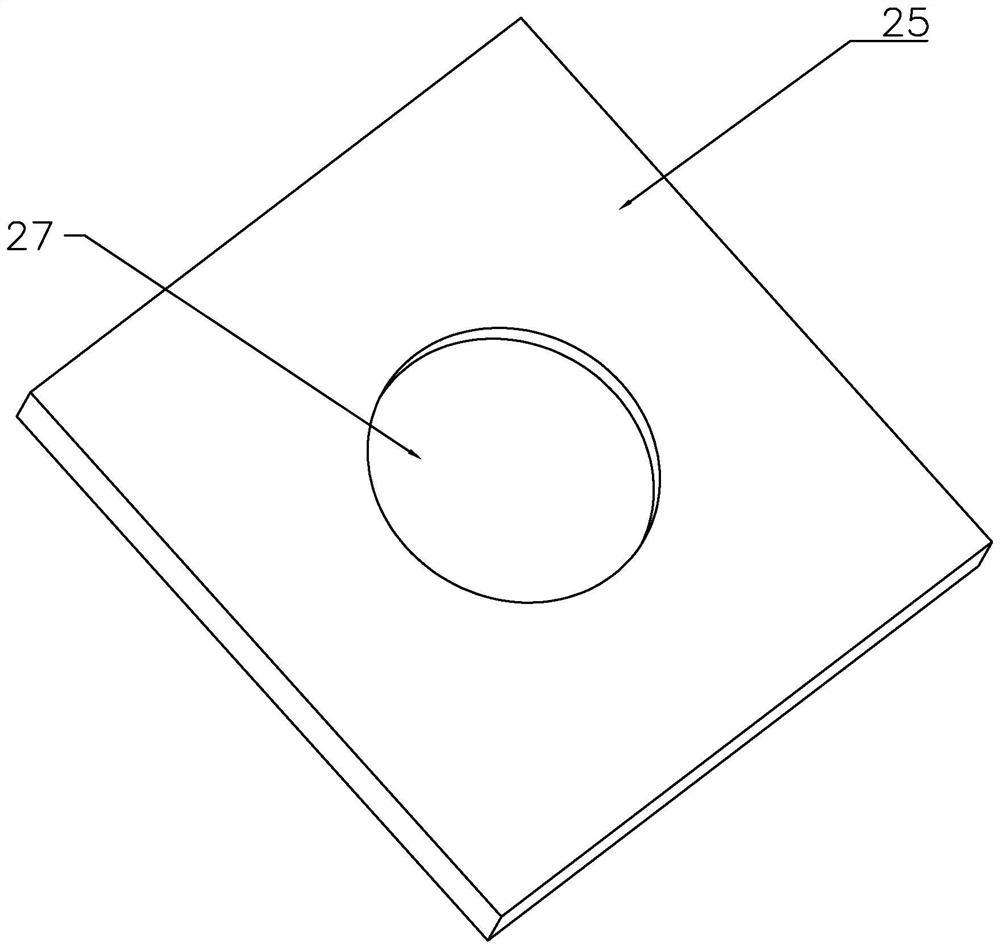
[0019] Such as Figure 1-4 As shown, an industrial robot with multiple forms and multiple walking modes includes an equipment base 1 for placing dishes, a wheel-leg device 2 connected to the left and right sides of the equipment base 1, and a wheel-leg device 2 for controlling switching walking The control device 3 of the form, the wheel leg device 2 includes a first wheel leg 4 hinged to the equipment base 1, a second wheel leg 5 hinged to the first wheel leg 4, and a hinge connected to the second wheel leg 5 The third wheel leg 6, the first rotating motor 7 for driving the first wheel leg 4 to rotate, the second rotating motor 8 for driving the second wheel leg 5 to rotate, and the second rotating motor 8 for driving the third wheel leg 6. A third rotating motor 9 that rotates. The control device 3 can control the two wheel leg devices 2 to cooperate to complete the gait simulation action. The third wheel leg 6 is provided with a hollow groove 10 and is located on the inner ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More