Robot navigation method based on Bayesian optimization multi-information gain exploration strategy
A technology for information gain and robotics, applied in the field of mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
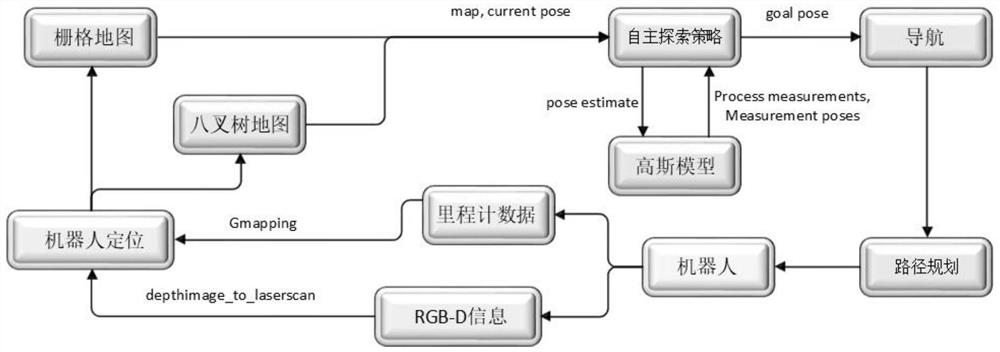
[0027] figure 1 For the structure diagram of the model system, refer to figure 1 , Inspired by the research of Bayesian optimization applied in various fields, the present invention provides a robot navigation model based on Bayesian optimization multiple information gain exploration strategy. The robot itself carries sensors such as odometers and RGB-D cameras, and inputs the sensors through the underlying depthimage_to_laserscan package and the Gmapping algorithm to complete robot positioning and build a two-dimensional grid map. At the same time, use the RGB-D information passed in by the robot The color map and depth map of the octree map are constructed, and then the current map information and the current pose of the robot are used as the input of the autonomous exploration algorithm proposed in this paper, the next best candidate point is calculated and the Gaussian model of the environment is updated, and finally carried out on the map A path is planned to reach the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com