Unmanned aerial vehicle autonomous landing method based on vision assistance
A technology for unmanned aerial vehicle and ship landing, which is applied in the direction of non-electric variable control, instrument, height or depth control, etc. It can solve the problems that affect the accuracy of landing, high computational complexity, and affect the accuracy of landing, so as to ensure accurate control, The effect of high control precision and simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
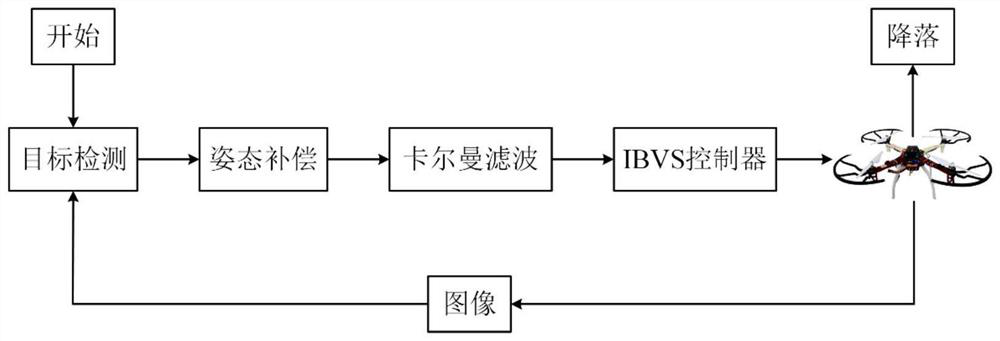
[0084] The invention adopts an image-based visual servo (IBVS) control method to realize the autonomous landing of the unmanned aerial vehicle on the sea surface ship. The entire control process does not need to calculate the position of the target relative to the UAV, but directly designs the control law on the image plane, thereby avoiding the deviation caused by the camera internal parameter calibration error in the position calculation process. System architecture such as figure 1 shown.
[0085] Such as figure 1 Shown, the UAV autonomous landing method based on vision aid of the present invention, it comprises:
[0086] Step S1: Design the landing sign; select two different types of two-dimensional codes, and form the landing sign by nesting them (see Figure 5 );
[0087] Step S2: Take an image; the UAV first captures the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com