All-attitude IMU attitude calculation method capable of reducing noise
A full-attitude, attitude technology, applied in the field of full-attitude IMU attitude calculation that can reduce noise, can solve problems such as affecting the measurement effect and poor data linearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The method for calculating the attitude of the noise-reduced full-attitude IMU of the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
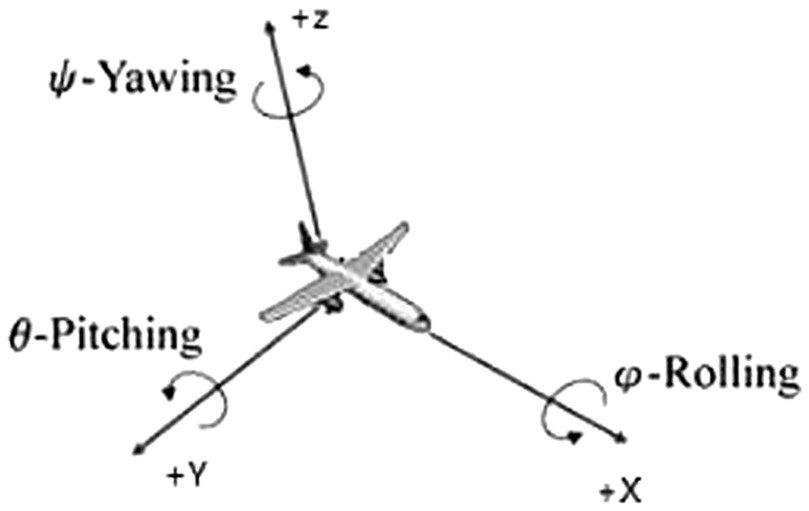
[0024] The aviation system described in this embodiment is as follows: figure 1 As shown, the rotation sequence of the aviation system is Z-Y-X. In the embodiment of the present disclosure, the values measured by the X, Y, and Z three-axis gyroscopes are respectively GyroX, GyroY, and GyroZ; For AccX, AccY and AccZ, the purpose of attitude calculation is to obtain the azimuth (Yaw), pitch angle (Pitch) and roll angle (Roll).
[0025] When the IMU is 9-axis (3-axis gyro + 3-axis accumulator + 3-axis magnetic compass), the pitch angle (Pitch) and roll angle (Roll) have the accumulative value as a reference, and the azimuth (Yaw) has a magnetic compass as a reference. refer to. The quaternion algorithm can output the three-axis attitude angle, but because the reliability ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com