Method for realizing three-dimensional space stress or strain path by using conventional triaxial apparatus
A technology of three-dimensional space and stress path, which is applied in the direction of applying stable tension/pressure to test the strength of materials, etc., can solve the problems of slow improvement of true triaxial instrument, expand test range and functional modules, reduce test cost, increase test Effects of function and scope
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
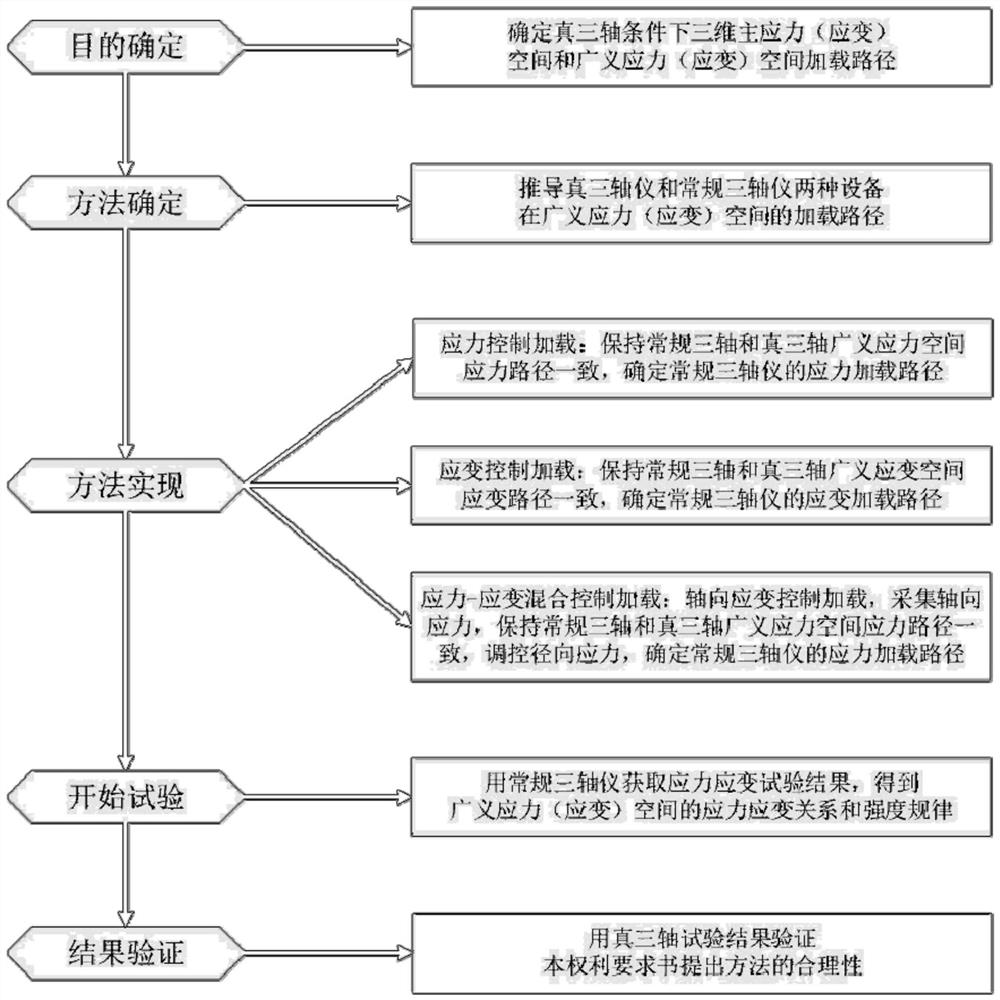
[0155] Example: such as figure 1 As shown, a method for realizing three-dimensional stress or strain path using a conventional triaxial instrument, which includes the following steps: determining the test program under true triaxial conditions in three-dimensional principal stress, principal strain space, and generalized stress, strain space the loading path of the generalized triaxial instrument and the conventional triaxial instrument in the generalized stress or strain space; control the loading method of the conventional triaxial instrument so that the loading path of the conventional triaxial instrument in the generalized stress and strain space The loading path of the axial instrument in the generalized stress and strain space is consistent; the conventional triaxial instrument is used to obtain the stress-strain test results, and the mechanical parameters of the generalized stress or strain space are obtained.
[0156] Among them: the above-mentioned loading methods for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More