

Remote control parking-in and parking-out path planning method and system, vehicle and storage medium
A path planning and remote control technology, applied in the field of remote parking, can solve the problem of high order of the path equation, and achieve the effect of strong adaptability, easy planning and realization, and low demand.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with accompanying drawing.
[0056] Such as figure 1 As shown, in this embodiment, a remote control method for planning a path for parking in and out of parking includes the following steps:
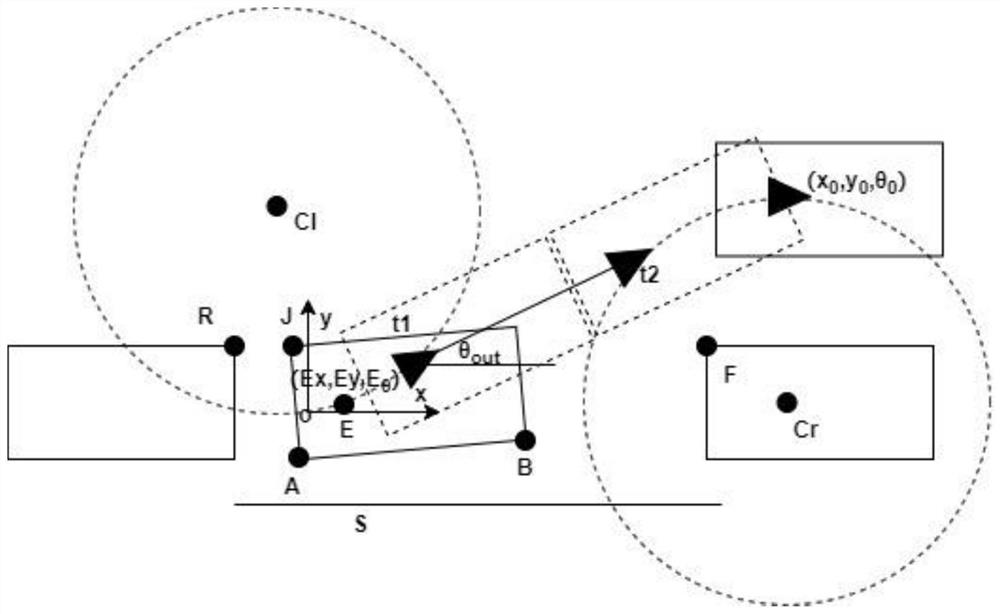
[0057] Step 1, assuming that the expected parking poses are: x 0 cm,y 0 cm, theta 0 rad; Poor out angle is θ Out rad; park out coordinate system xoy such as figure 1 As shown in , the origin is the location of the center point of the axis after the system is activated.
[0058] According to engineering experience, the preset value of 0.6108rad is θ Out The lower limit of Minθ Out . In the actual algorithm, the actual posture E will be based on the size of the parking space θ Choose the right θ Out , namely θ Out ≥Minθ Out .
[0059] Step 2, when the driving direction of the vehicle is switched to the D gear, according to the current vehicle positioning position E(Ex, Ey, E θ ), where E θ is th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More