

Method for controlling plastering robot to move by hand-drawing trajectory
A trajectory control and robot technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of poor real-time performance, large amount of calculation, high hardware requirements, etc., and achieve the effect of reducing the amount of calculation, reducing the amount of calculation, and simple operation mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
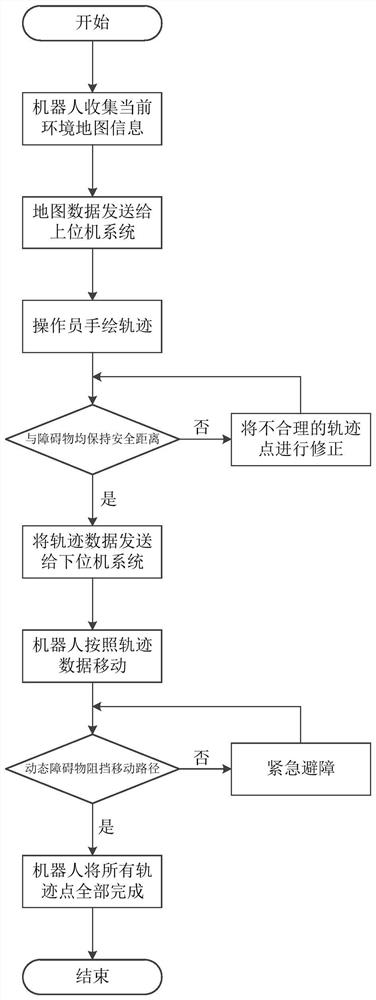
[0028] Such as figure 1 As shown in the figure, a method for controlling the movement of a plastering robot with a hand-drawn trajectory adopts the upper computer system and the lower computer system; For the lower computer system; the lower computer system includes the mobile control module and the sensor module of the robot, the function is to receive the trajectory data sent by the upper computer, control the robot to move according to the trajectory data after processing, and collect environmental information in real time during the movement , to realize the obstacle avoidance of the robot to dynamic obstacles; the working steps include:
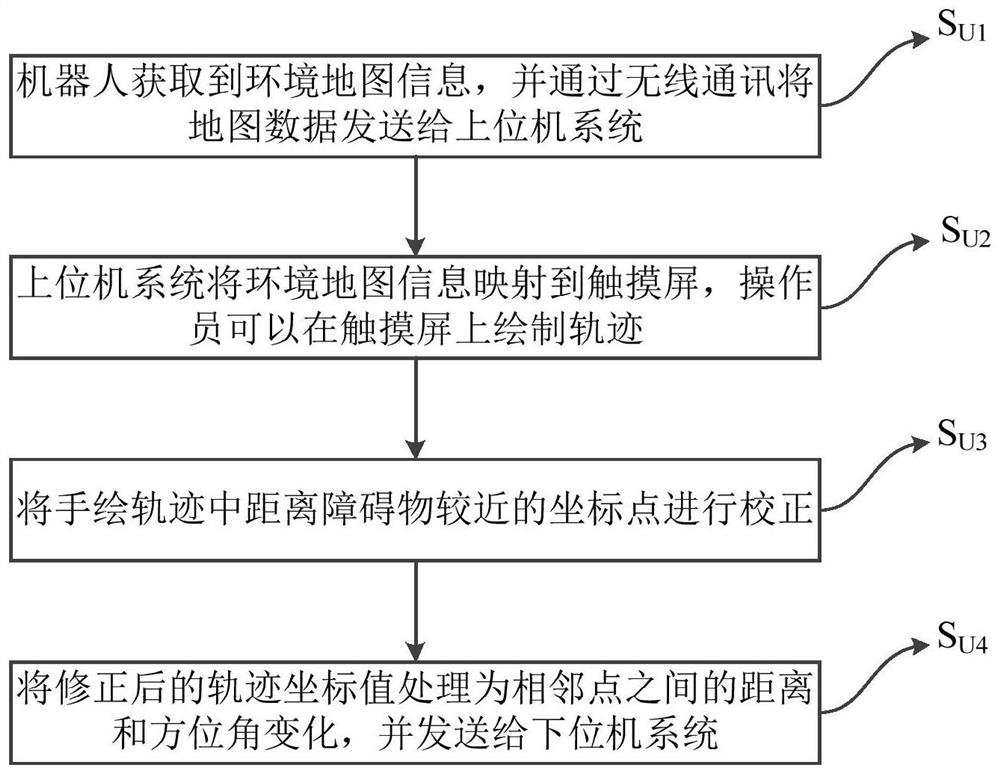
[0029] Step 1. Map the environmental map collected by the robot to the touch screen of the mobile phone, and the operator draws the trajectory of the robot by hand;
[0030] Step 2. Systematically evaluate the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More