Vision-based multi-sensor fusion intelligent fireproof robot
A multi-sensor fusion and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as troublesome, low detection accuracy, and prone to false alarms, so as to ensure efficiency, increase fire-fighting efficiency, and prevent false alarms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
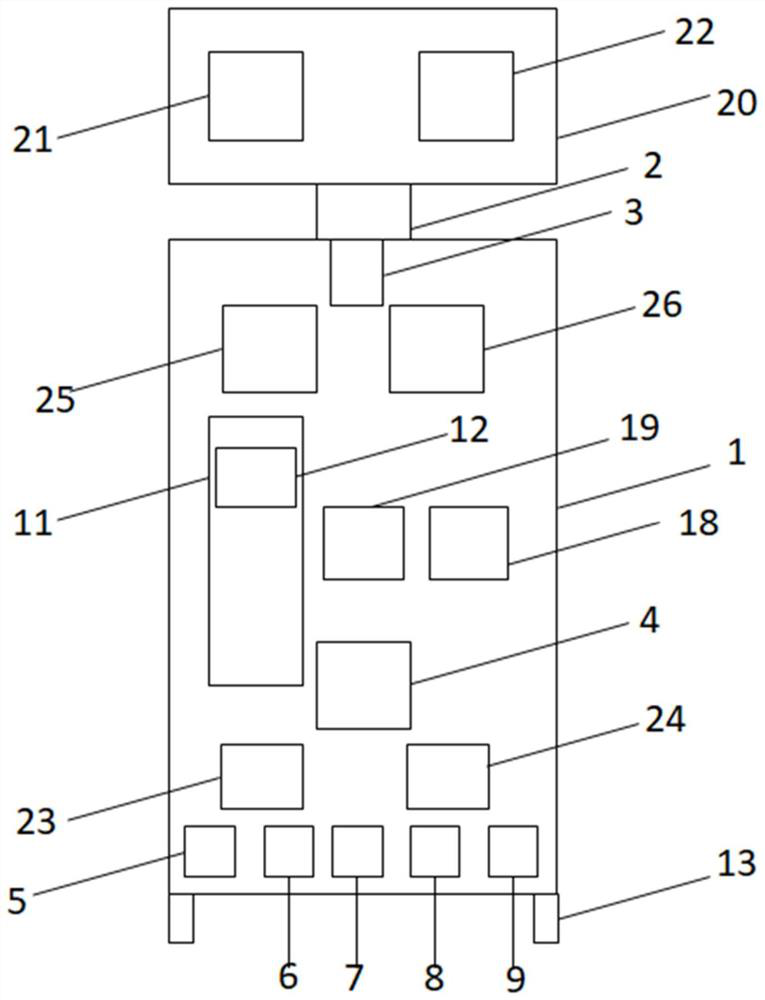
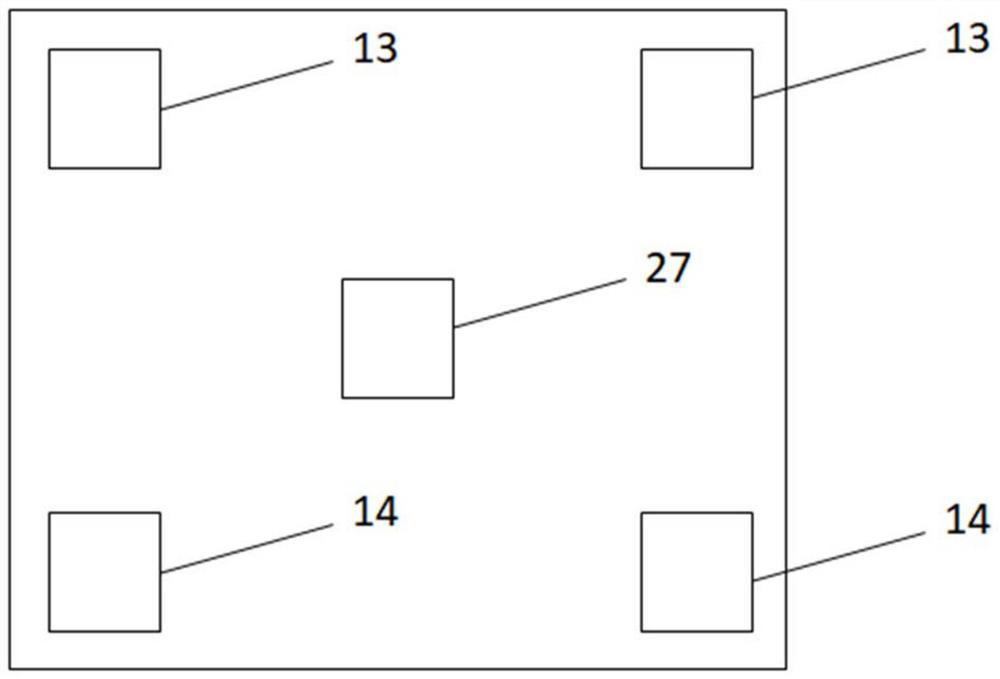
[0031] This embodiment provides a kind of intelligent fire prevention robot based on multi-sensor fusion of vision, comprising robot body, camera group and sensor group, camera group and sensor group are all arranged on the outside of robot body, camera group includes depth camera, monocular camera, An infrared camera and a high-definition camera, the sensor group includes an ultrasonic sensor, an infrared sensor and a smoke sensor, and a control system is provided in the robot body, and the control system is connected to the camera group and the sensor group.
[0032] Such as figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com