

Travelling crane avoidance and path scheduling method and system for unmanned grab bucket travelling crane
A scheduling method and scheduling system technology, applied in the direction of instruments, data processing applications, forecasting, etc., can solve problems such as decreased efficiency and avoid frequent triggering, and achieve the effect of improving efficiency, safe and efficient collaborative operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
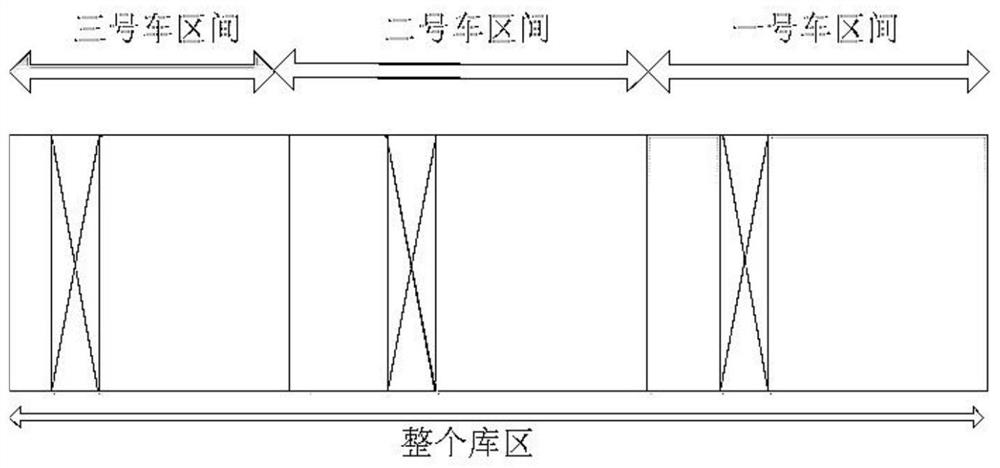
[0040] According to the driving avoidance and path scheduling method of unmanned grab driving provided by the present invention, before the system starts to run, the gray busbar and its supporting equipment (including large and small car vibration boxes, antenna boxes, start-end boxes, terminal boxes and On-board electrical cabinets, etc.) are installed on the corresponding positions of large and small vehicles according to requirements, and form a two-dimensional coordinate system. When the system starts to run, select the operation mode, and the system will automatically set the operation interval for each driver. Click the unloading button on the screen, and the vehicle will start to automatically perform the unloading operation, and start to perform the following steps, such as Figure 4 :
[0041] Step 1. The system determines the pick-up point and drop-off point of each truck according to the material distribution in the warehouse area. After each truck obtains the instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More