

Ground command and control system for UAV swarms based on multi-level formation
A technology of control system and ground command, applied in the direction of control/regulation system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of comprehensive task management of unmanned drone bee colony system, and improve the task The effect of command efficiency and efficient access
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention is further defined below with reference to the accompanying drawings and embodiments of the description, but is not limited thereto.
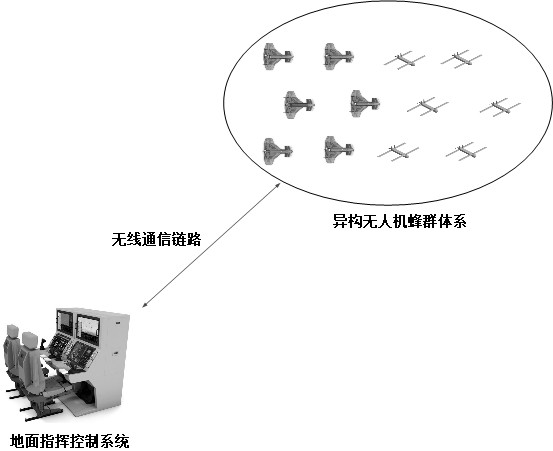
[0065] A UAV swarm ground command and control system based on multi-level formation is the command and control core of the UAV swarm system. It communicates with the heterogeneous UAV swarm system through wireless communication links. Human-machine swarms implement remote command and control, such as figure 1 shown.
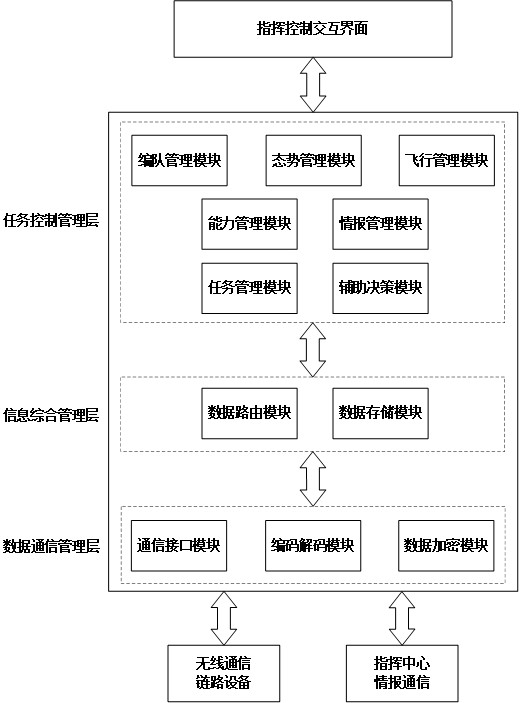
[0066] In order to realize the flexible and dynamic control of the drone bee colony, the present invention adopts a modular structure framework, and divides the command and control system into three layers: the data communication management layer, the information comprehensive management layer, and the task control management layer. figure 2 shown. Among them, the data communication management layer uses wireless links to communicate with all UAVs in the UAV swarm system, and manages the encoding an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More