

Hybrid air motor air vehicle
A hybrid and aircraft technology, applied to hybrid vehicles, aircraft, motor vehicles, etc., can solve the problems of engine noise, discomfort, etc., and achieve the effect of reducing discomfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following description is exemplary only and is not intended to limit the disclosure, application or use. It should be understood that throughout the drawings, corresponding reference numerals indicate like or corresponding parts and features.
[0038] Hereinafter, a hybrid air-powered aircraft in an exemplary form of the present disclosure will be described with reference to the accompanying drawings.
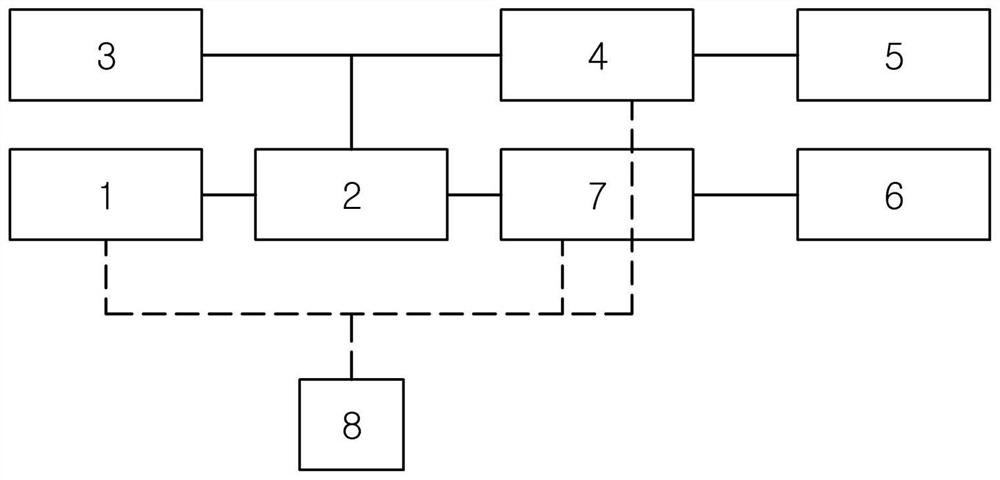
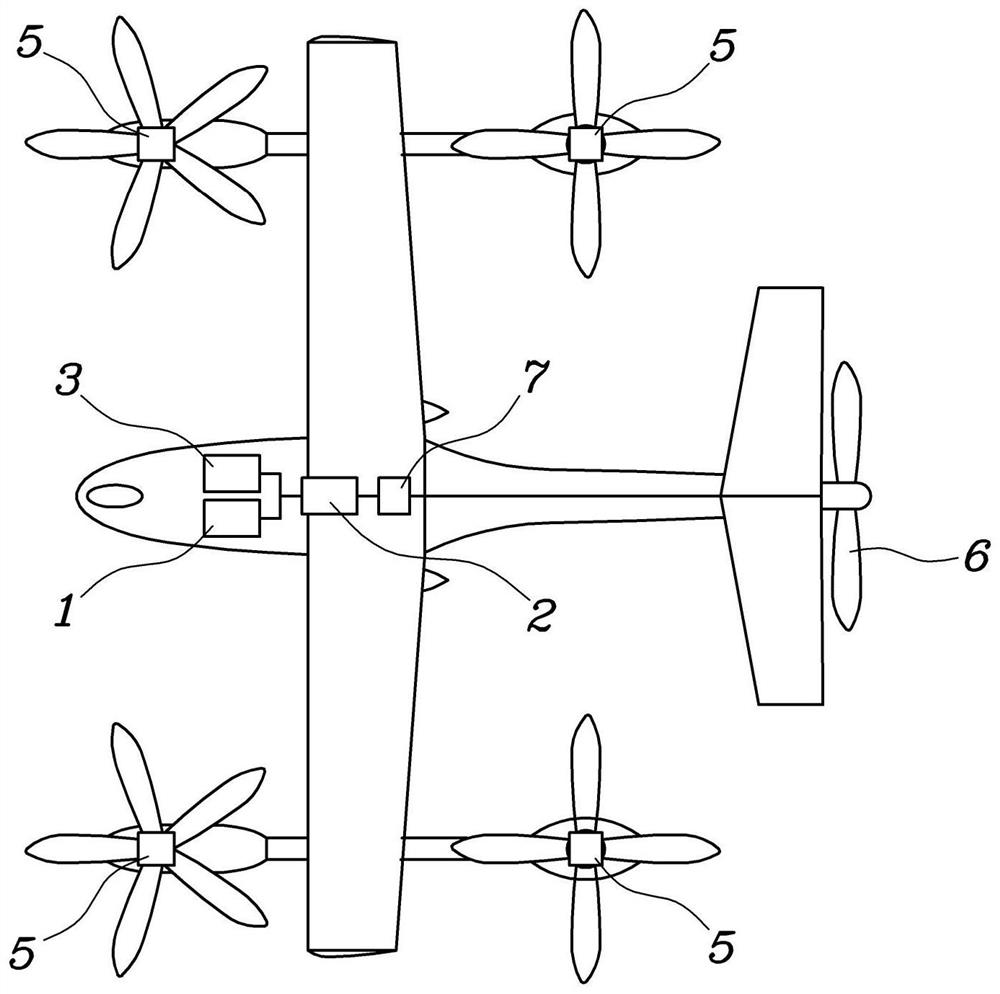
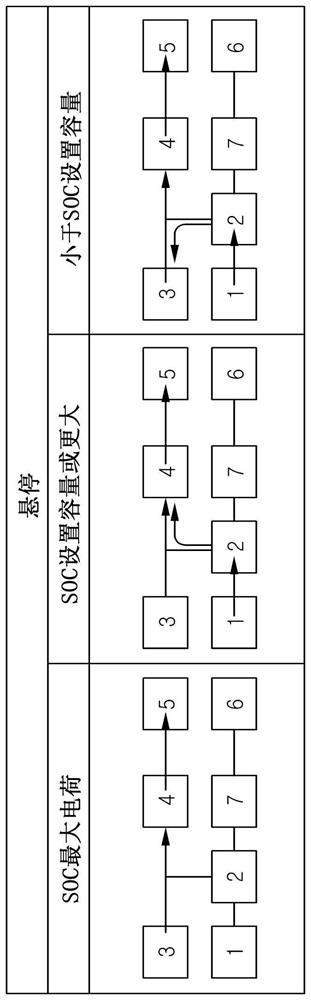
[0039] figure 1 is a configuration diagram of a hybrid air-powered aircraft according to a form of the present disclosure, figure 2 is showing figure 1 A diagram of a hybrid air-mobile vehicle is shown, image 3 and Figure 4 is description figure 1 A diagram of the hover control of a hybrid air-mobility vehicle is shown, Figure 5 is description figure 1 A diagram showing the control of a hybrid air-mobile vehicle during cruise while hovering, Figure 6 and Figure 7 is description figure 1 A diagram of the cruise control of the hybrid air maneuvering veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More