

Unmanned vehicle tracking control method and device
An unmanned vehicle, tracking control technology, applied in vehicle position/route/altitude control, control/regulation system, non-electric variable control and other directions, can solve problems such as the inability to meet the real-time tracking control needs of unmanned systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
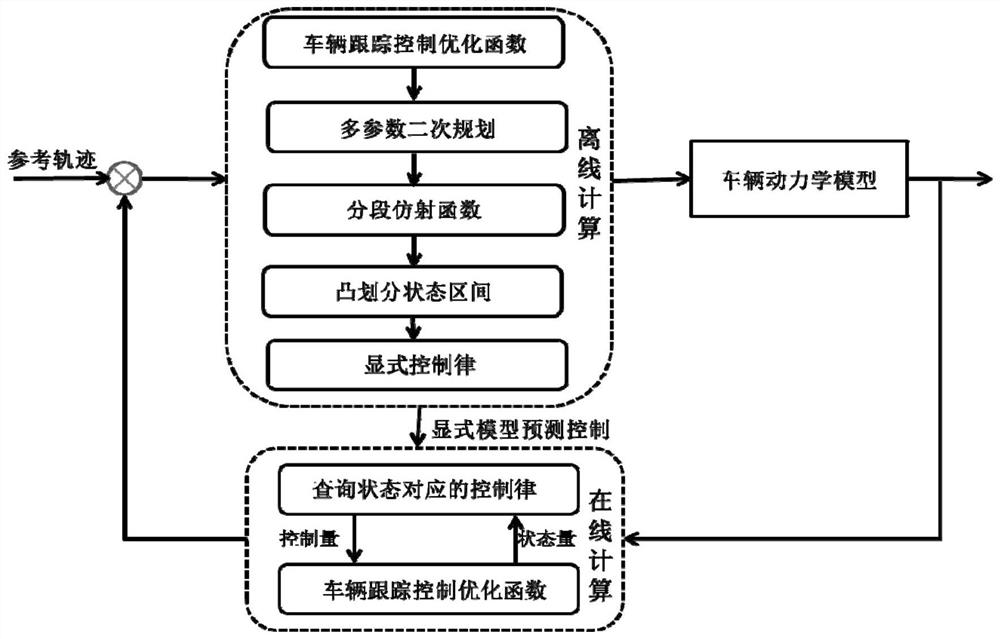
[0048]The invention adopts the explicit model predictive control to control the self-driving vehicle, and its main idea is to use the multi-parameter quadratic programming theory to solve the optimization control problem of the linear time-invariant constraint system. In this method, the state quantity of the system is taken as a parameter, the state area is divided convexly, and the optimal state feedback control rate and state control explicit relational expression of each state partition is calculated off-line. At each sampling moment, according to the state partition where the current system state quantity is located, the corresponding control explicit relational expression is obtained by looking up the table, and the current optimal front wheel angle control quantity is obtained. The explicit model predictive control method does not need repeated online optimization, which can improve the online calculation speed. A tracking control method for an unmanned vehicle and a tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More