

Logistics transfer robot work abnormity detection method and system based on image processing
An image processing and anomaly detection technology, applied in image data processing, image analysis, image enhancement, etc., can solve the problem of wheel slipping, obstruction, blocking, affecting work efficiency, and the uniformity of speed cannot accurately detect the abnormality of logistics transfer robots To avoid property loss and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further explain the technical means and effects of the present invention to achieve the intended purpose of the invention, the method and system for abnormal operation of logistics transfer robots based on image processing proposed according to the present invention will be described below in conjunction with the accompanying drawings and preferred embodiments. The specific embodiment, structure, feature and effect thereof are described in detail as follows. In the following description, different "one embodiment" or "another embodiment" do not necessarily refer to the same embodiment. Furthermore, the particular features, structures, or characteristics of one or more embodiments may be combined in any suitable manner.
[0025] Unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the technical field of the invention.
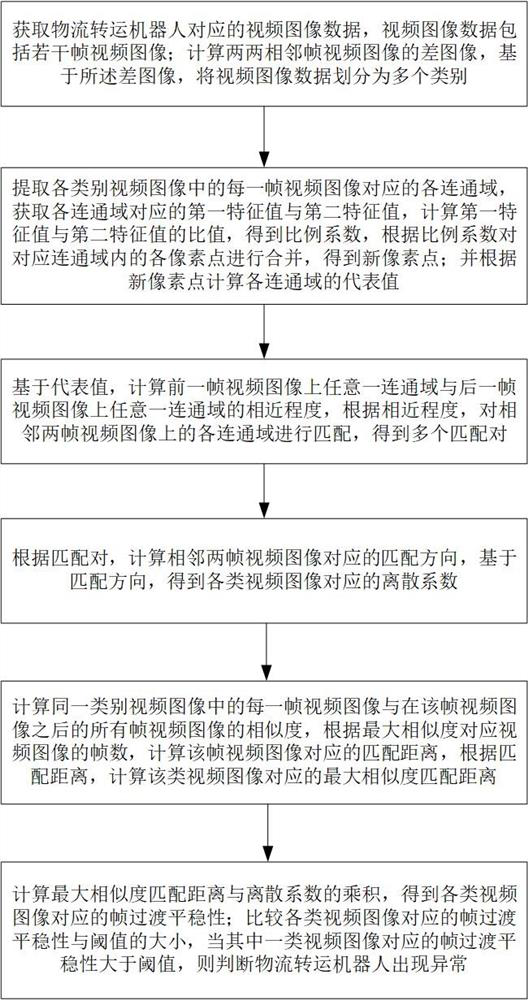
[0026] see figure 1 , which shows a flow chart...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More