

Optimal trajectory planning method and system for intelligent vehicle in continuous curve scene
A technology for intelligent vehicle and trajectory planning, applied in the directions of road network navigators, navigation, instruments, etc., which can solve the problems of long calculation time and poor real-time performance of nonlinear MPC.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
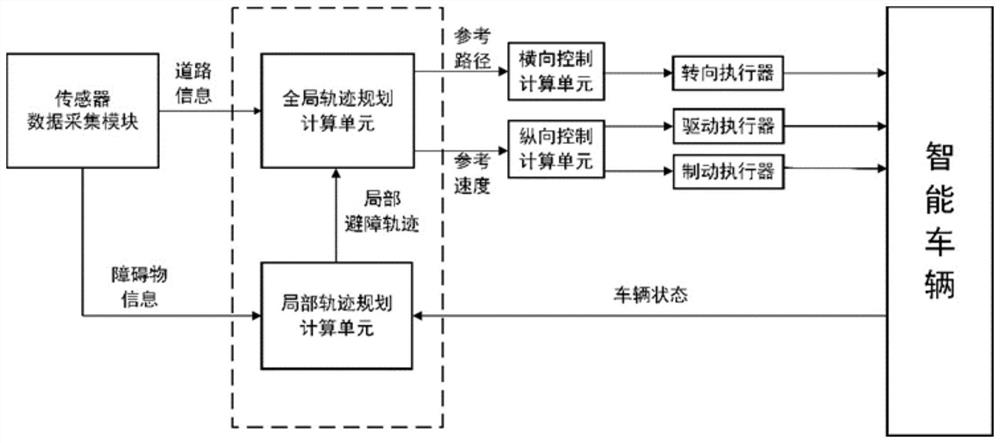
[0077] Such as figure 1 As shown, the optimal trajectory planning method of the intelligent vehicle in the continuous curve scene provided by the embodiment of the present invention includes:
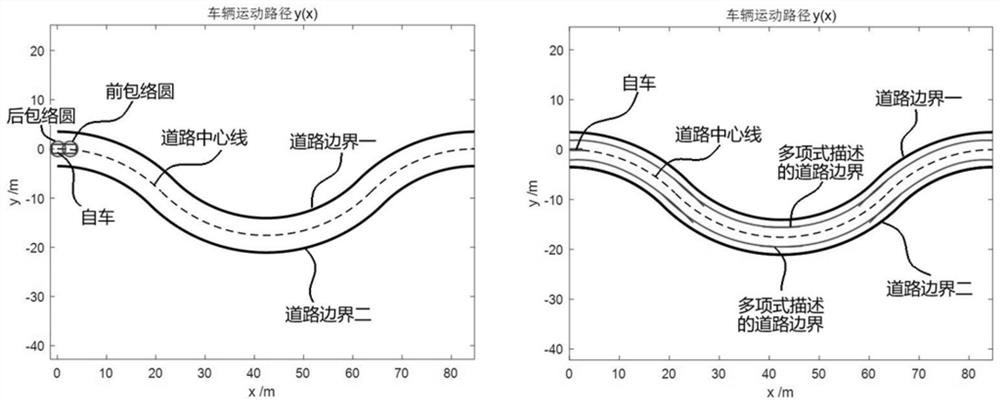
[0078] Step 1. Obtain the road information of the road where the ego vehicle is located through the sensor. The road information includes the road boundary point, the coordinates of the centerline point of the road, the coordinates of the ego vehicle starting point, and the road width. Such as figure 2 The road boundaries indicated in the shown road model include road boundary 1 and road boundary 2, and the dotted line eleven between them is the road centerline. In the road model, the road width w formed by road boundary 1 and road boundary 2 relative to each other road It is the default value, such as mountain roads, race tracks, winding roads, etc., the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More