

Lane obstacle avoidance method and device for autonomous vehicle
An automatic driving and vehicle technology, applied in the field of lane obstacle avoidance methods and devices for automatic driving vehicles, can solve problems such as inability to solve obstacle avoidance problems, and achieve the effect of improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
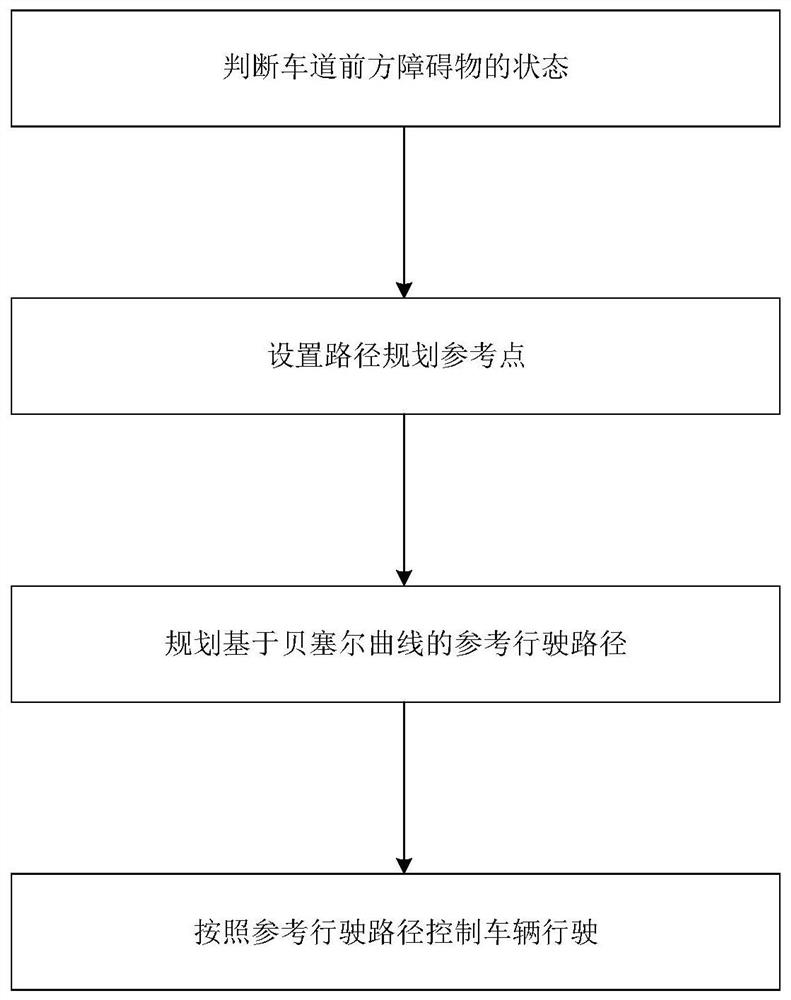
[0035] This embodiment proposes a lane obstacle avoidance method for an autonomous vehicle. The overall process is as follows figure 1 As shown in the figure, the realization idea of this method is: according to the movement of obstacles, plan a reference driving path based on Bezier curve on the current lane; make the vehicle avoid obstacles on the current lane according to the planned reference driving path. The specific steps for realizing this method are as follows:
[0036] 1) Determine the status of the obstacles in front of the lane. The status of the obstacles includes: stationary, driving in the same direction, driving in the opposite direction, and crossing the lane.
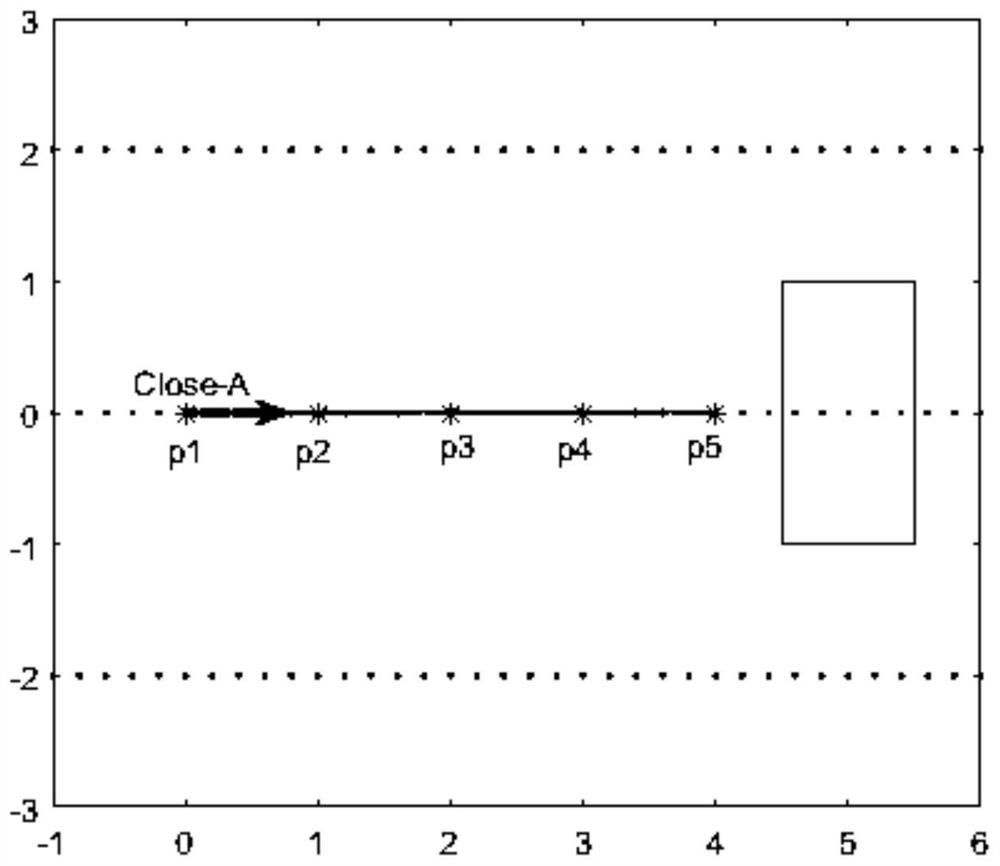
[0037] 2) According to the different states of the obstacles, combined with the distance between the vehicle and the obstacle Dis_obs, set the path planning reference point. The settings are as follows:
[0038] For the situation where the obstacle state is driving in the same direction:
[0039] ...
Embodiment 2
[0061] This embodiment proposes a lane obstacle avoidance method for an autonomous vehicle. The overall process is as follows Figure 5 shown, the specific steps are as follows:
[0062] Step 1: Use the navigation and positioning system to calculate the reference path information, including the positioning solution state, horizontal and vertical coordinates, heading angle, and curvature change information of the path point set.
[0063] Step 2: Determine whether the front-end input (perception, positioning and other information) of the decision-making meets the conditions for automatic driving. The specific judgment content includes: positioning solution judgment; positioning communication fault judgment, sensing fault judgment, when positioning and sensing are correct and the positioning solution is in the best state, it will enter the automatic driving mode.
[0064] Step 3: According to the vehicle pose and reference path, determine whether the vehicle is currently in a si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More