

Horizontal multi-joint follow-up screw locking machine
A horizontal multi-joint, screw machine technology, applied in metal processing equipment, metal processing, manufacturing tools and other directions, can solve the problems of reduced work efficiency, unstable products, difficult to promote and apply, etc., to reduce artificial fatigue strength, stable and efficient pre-production. The effect of tightening screws and reducing environmental noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0048] The specific implementation of the present invention will be described in detail below with reference to specific embodiments.
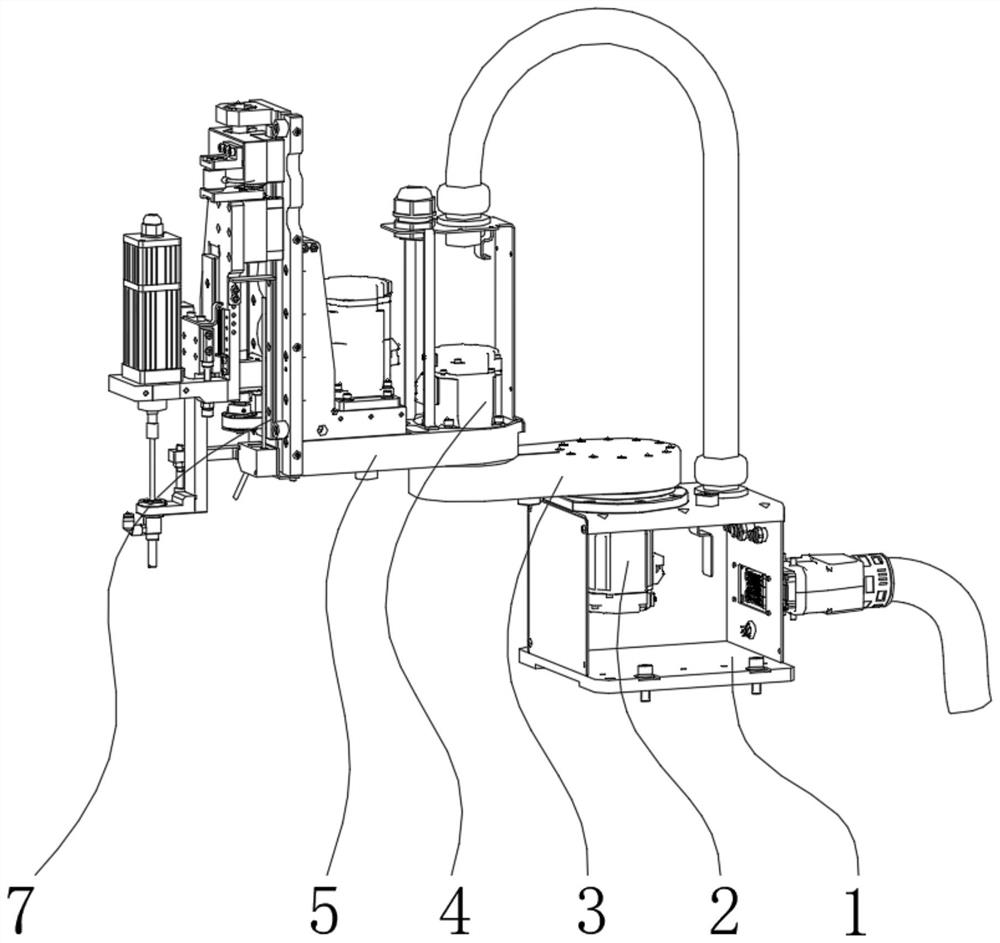
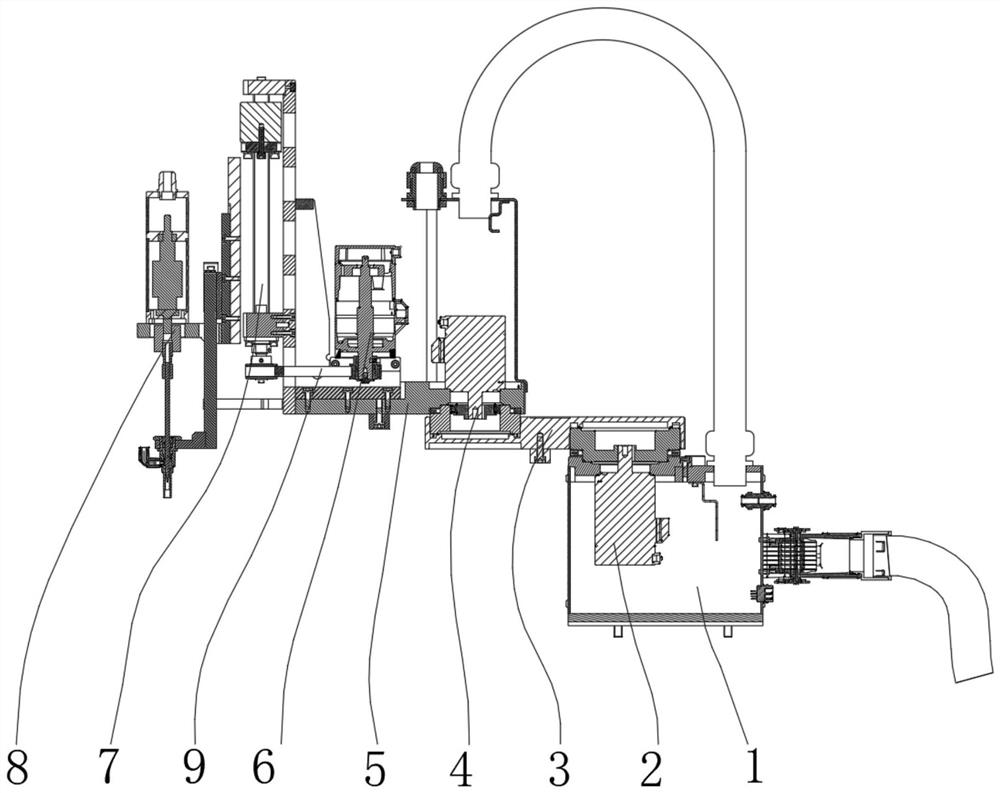
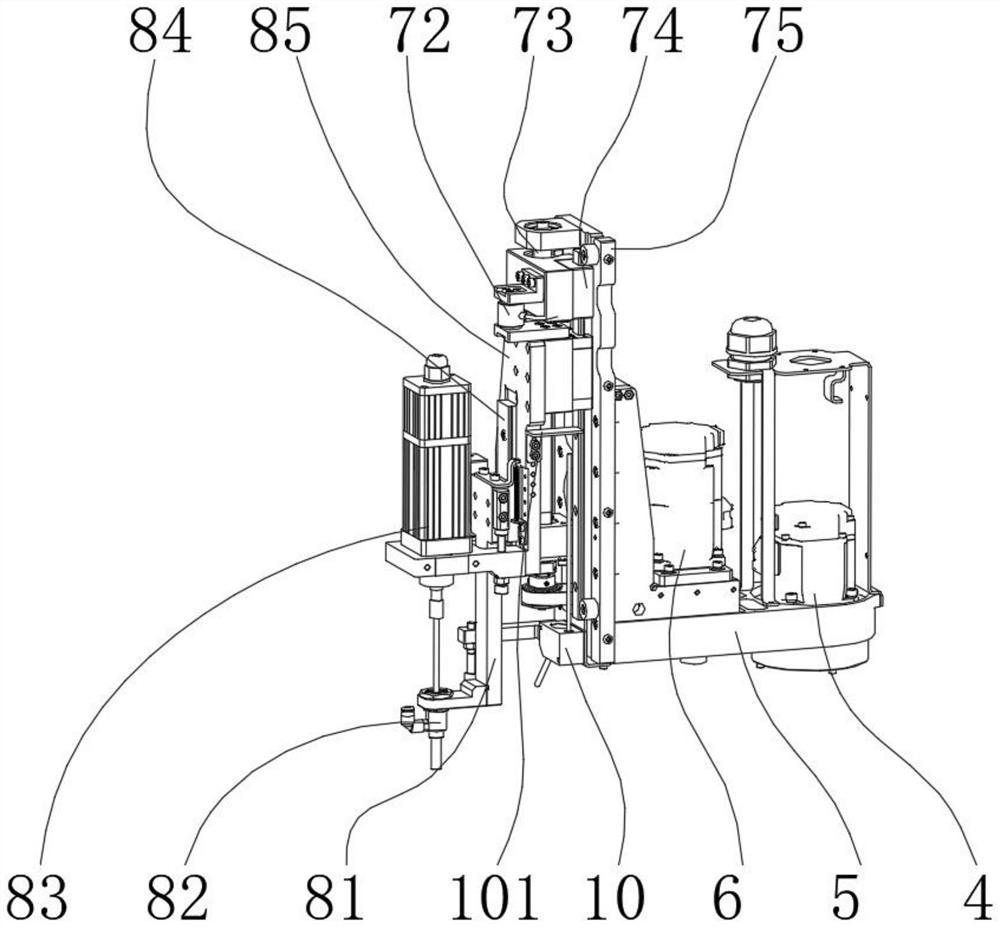
[0049] In one embodiment of the invention, see figure 1 , figure 2 , image 3 and Figure 4 , the horizontal multi-joint follow-up type locking screw machine includes a robot base 1, the robot base 1 is provided with a first-level mechanical arm 3, and the robot base 1 is installed with a first joint Drive 2, the output end of the first joint drive 2 is connected to one end of the first-stage mechanical arm 3, the other end of the first-stage mechanic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More