Unmanned aerial vehicle cluster rapid steering method based on differential acceleration
A UAV, acceleration technology, applied in vehicle position/route/altitude control, advanced technology, climate sustainability, etc., can solve the tailing phenomenon, the slow steering of UAV swarms, the inability of swarms to achieve speed consistency, etc. problem, to achieve the effect of maintaining cohesion and reducing turning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Embodiments of the technical solutions of the present invention will be described in detail below with reference to the accompanying drawings. The following examples are only used to more clearly illustrate the technical solutions of the present invention, and are therefore only used as examples, and cannot be used to limit the protection scope of the present invention.
[0033] It should be noted that, unless otherwise specified, the technical or scientific terms used in this application should have the usual meanings understood by those skilled in the art to which the present invention belongs.
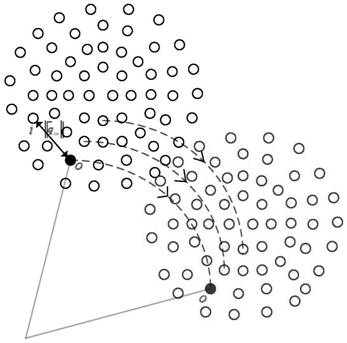
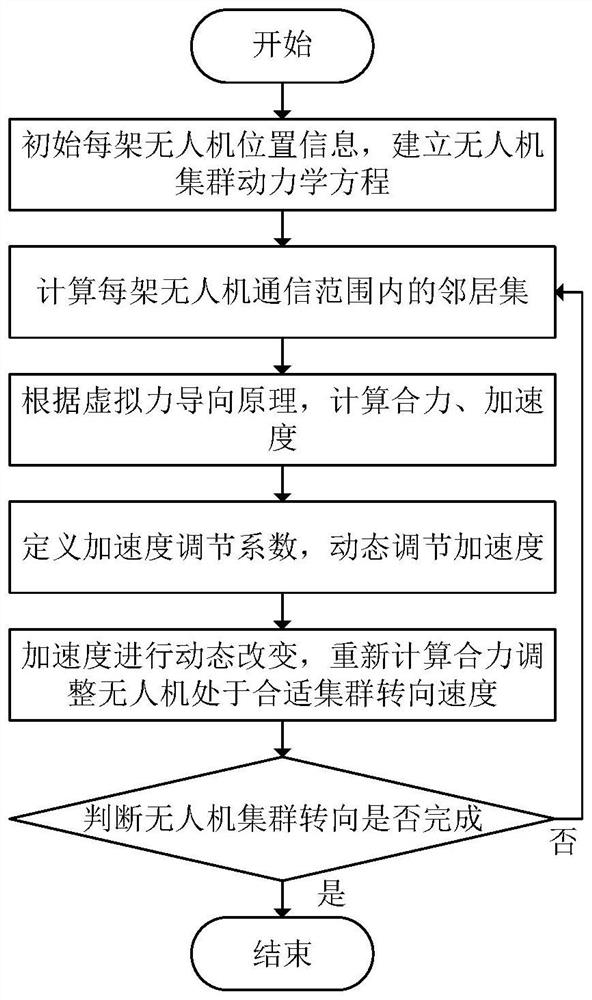
[0034] According to the present invention, aiming at the problem of UAV swarm steering, a method for UAV swarm steering based on differential acceleration is proposed. When the UAV swarm turns, in order to make the UAV swarm without tailing phenomenon, to achieve the effect of rapid turning. The UAV swarm motion equation is established, and the resultant force and accelerati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com