Depth map and pose optimization method and system
An optimization method and depth map technology, applied in the field of computer vision, can solve problems such as unstable optimization process and poor perception of large targets, and achieve complete and accurate prediction results, clear and accurate prediction results, and reduce interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
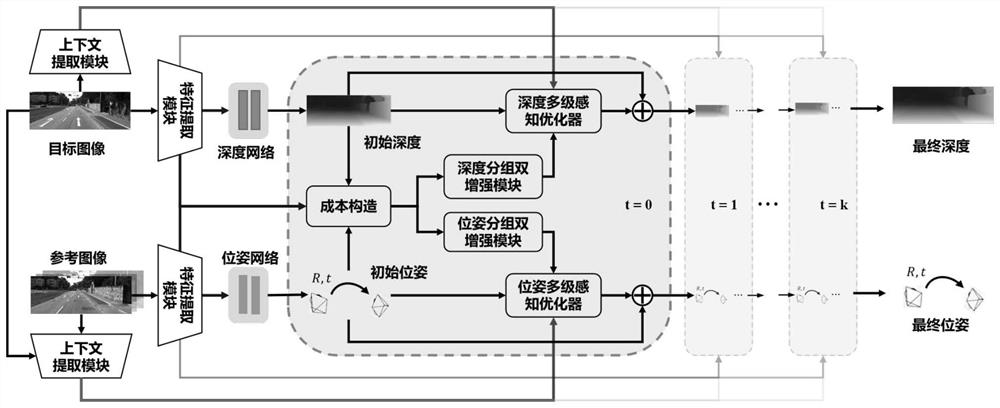
[0040] as Figure 1 Shown, a depth map and pose optimization method and system based on grouped dual enhancement modules and multi-level perception optimizers, comprising the following steps.
[0041] Step 1, Data Preparation, divided into two steps:
[0042] 1.1, the preparation includes RGB image data, real depth map data and real camera posture data sequence, such as KITTI unmanned driving data set, which contains the car camera and a variety of sensors acquired image data, true depth map data and real camera posture data sequence.
[0043] 1.2, The target image It, the adjacent image of It (i from 1 to 2), the true pose Pi of It relative to Iri, and the true depth map of It are extracted from the preliminary data of 1.1. Preferably, the size of the image is preprocessed to be 320 pixels high and 960 pixels wide.
[0044] Step 2, image feature extraction and contextual information extraction. Utilize the Feature Extraction Module and context extraction module to It and Iri in St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com