

Crawler-type stay cable robot capable of achieving radial balance adjustment
A radial balance, robot technology, applied in the field of machinery, can solve the problems of high equipment cost and maintenance cost, low work efficiency, low flexibility, etc., to achieve safe and stable work, improve work efficiency, and ensure the effect of recognition effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below with reference to specific embodiments. The exemplary embodiments and descriptions of the present invention are used to explain the present invention, but are not intended to limit the present invention. Hereinafter, the present invention will be illustrated by taking a regular octagonal frame as the robot frame 4 .
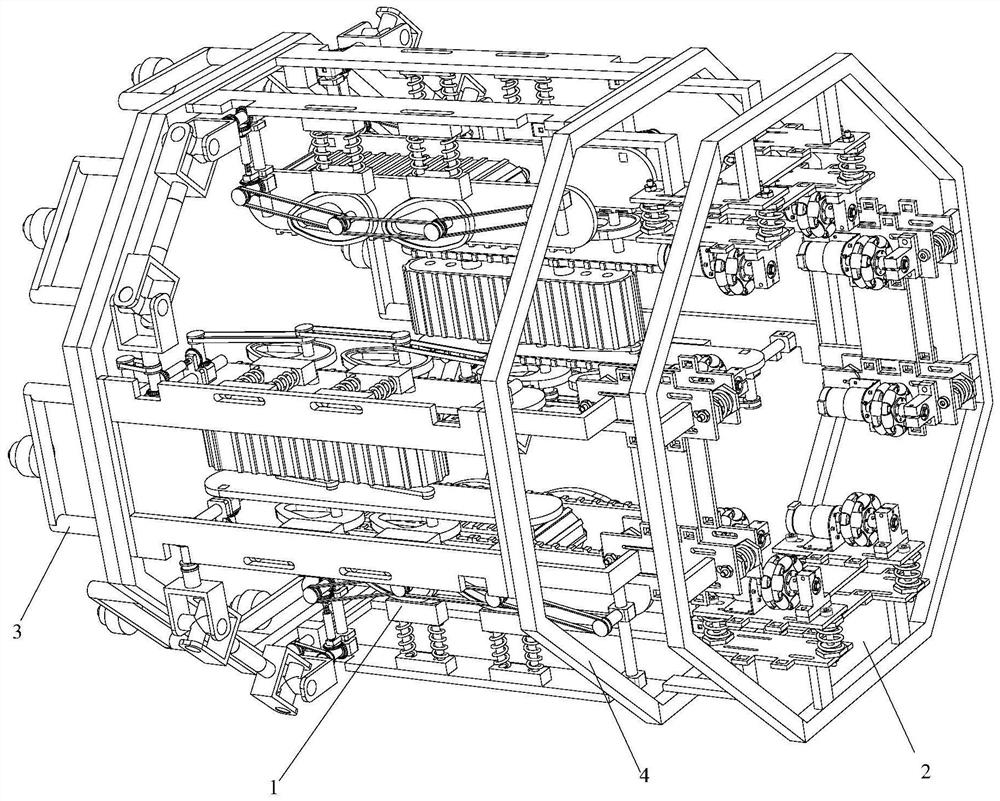
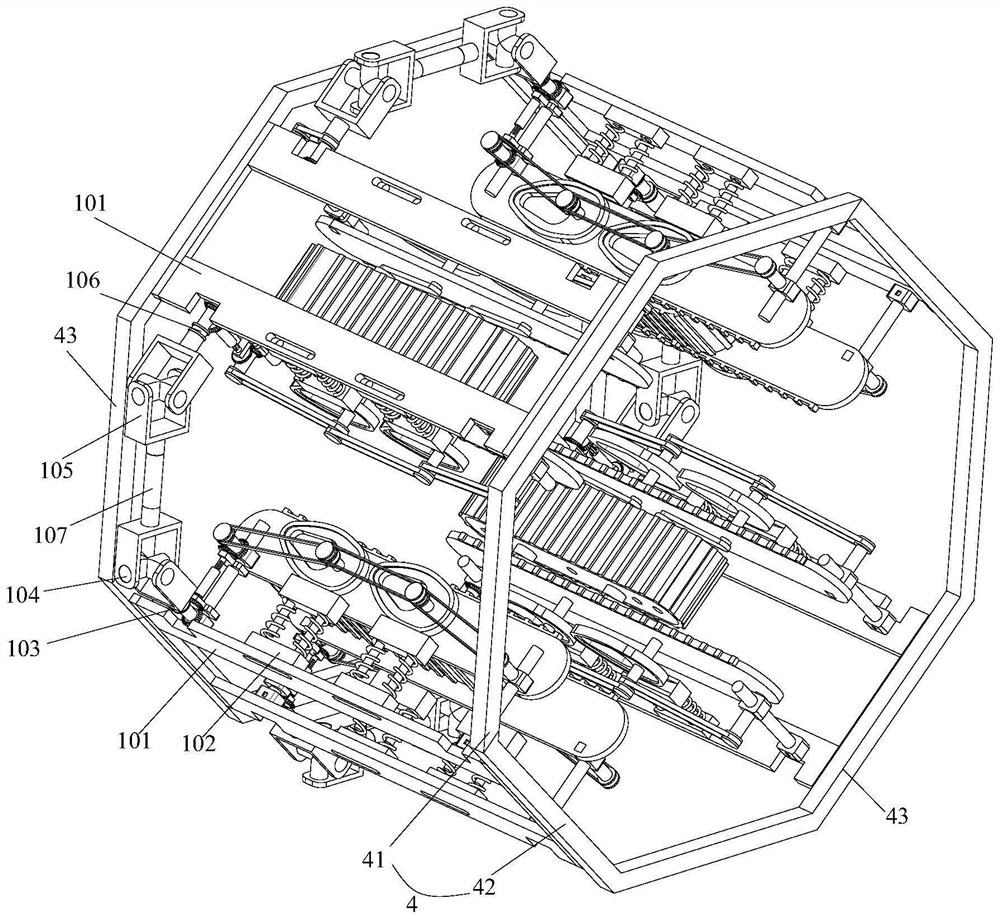
[0041] like Figure 1 to Figure 10 As shown, the present invention provides a crawler-type cable-stayed robot with adjustable radial balance, including a robot frame 4, a walking module 1 arranged in the robot frame 4, and a radial balance module 2 arranged at the front and rear ends of the robot frame 4 , AI defect detection module 3, AI defect detection module 3 is used for visual inspection of the stay cable, and the radial balance module 2 is used for radial balance between the walking module 1 and the stay cable;
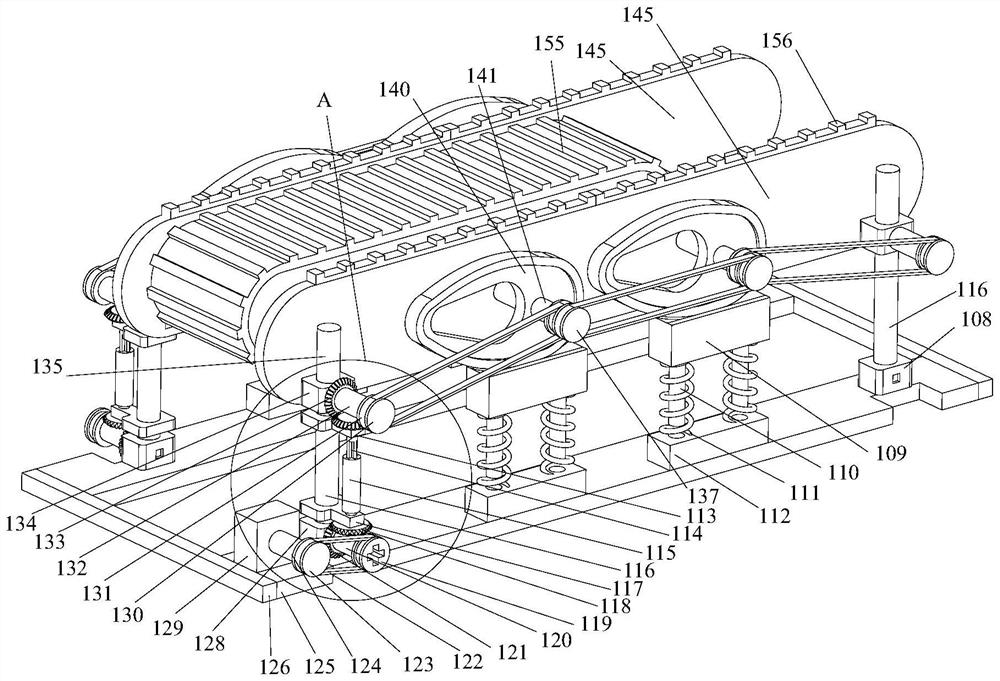
[0042] The walking module 1 includes four climbing mechanisms arranged in the robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More