

Continuous pedestrian trajectory prediction method based on memory enhancement network
A trajectory prediction and network enhancement technology, applied in the field of intelligent transportation, can solve the problems of lack of pedestrian location or surrounding environment, inaccurate pedestrian trajectory, forgetting, etc., to improve the accuracy of long-term trajectory prediction, improve long-term dependence, and slow down forgetting. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below with reference to the accompanying drawings and embodiments. This figure is a simplified schematic diagram, and only illustrates the basic structure of the present invention in a schematic manner, so it only shows the structure related to the present invention.
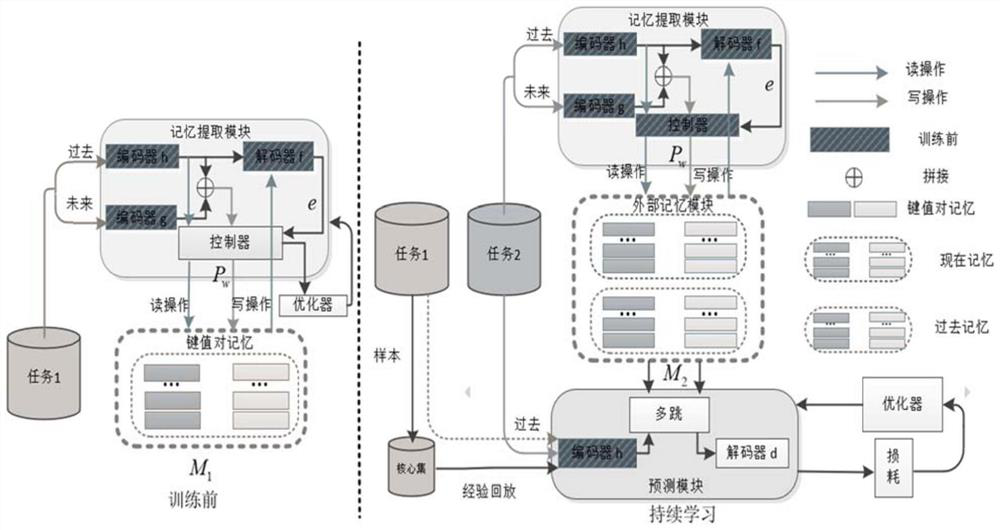
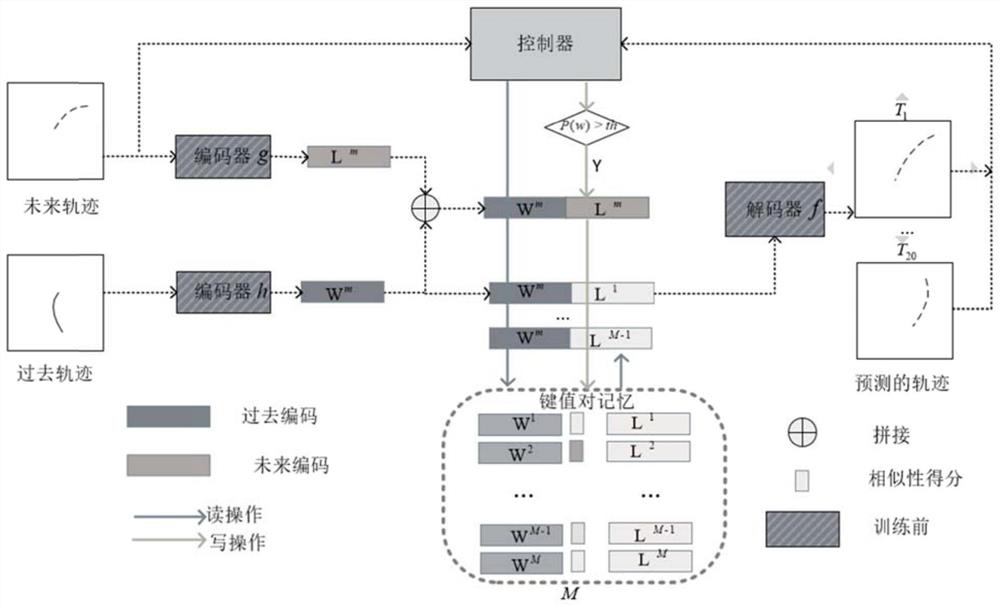
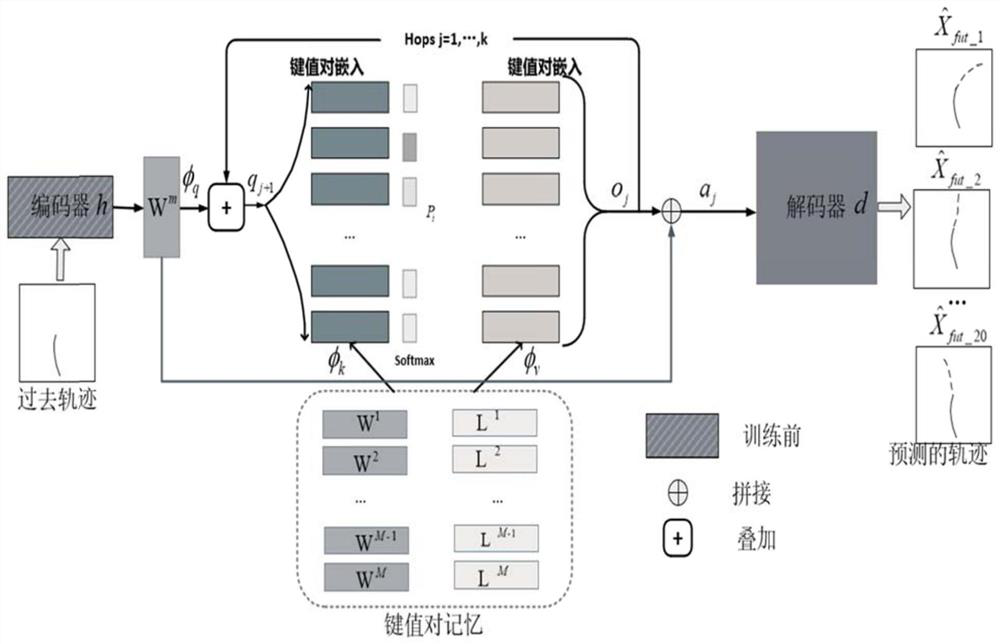
[0037]The present invention firstly introduces a memory extraction module, in which the self-encoder is used to encode the input information, and the controller is responsible for reading and writing memory from the key-value memory. Then, the multi-hop attention mechanism is used in the memory network to realize multi-modal trajectory prediction, that is, through multi-hop iterative query, each hop result is decoded to generate a predicted trajectory. Finally, the observed trajectory and the future trajectory are used as the input of the encoder, the future trajectory is reconstructed through the decoder, and the controller is then trained to select some typ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More