

Robot for climbing and crossing between pipes
A technology between robots and pipes, applied in the field of robots, can solve problems such as high time cost, great difficulty, and personal safety threats, and achieve the effects of easy automatic design, convenient disassembly and maintenance, and simple operation mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
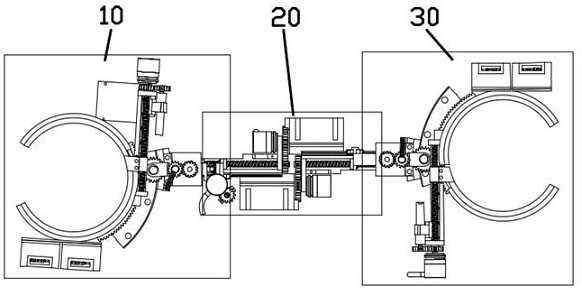
[0045] An inter-tube climbing and spanning robot, such as figure 1 As shown, including: lifting claw 10, body 20 and non-elevating claw 30;
[0046] The body 20 is used to connect the non-lifting claw 30 and the lifting claw 10 respectively through the corresponding linear telescopic mechanism, and expand and contract on the left and right of the body 20 to adapt to the change of the distance between the pipes;
[0047] Wherein, swing joints are provided between the lifting claw 10 and the body 20 and between the non-lifting claw 30 and the body 20 to drive the body 20 to rotate relative to the lifting claw 10 or the non-elevating claw 30 in the horizontal plane; the lifting claw 10 A lift transmission mechanism 110 is also provided for driving the body 20 to move along the axis of the pipeline.
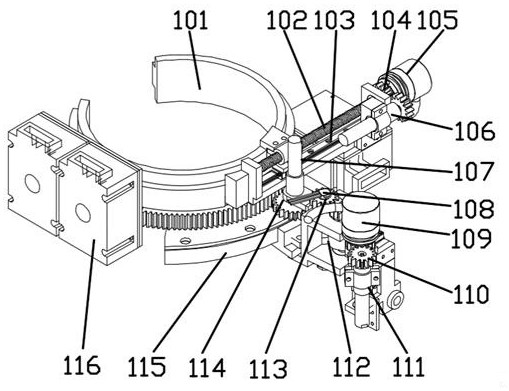
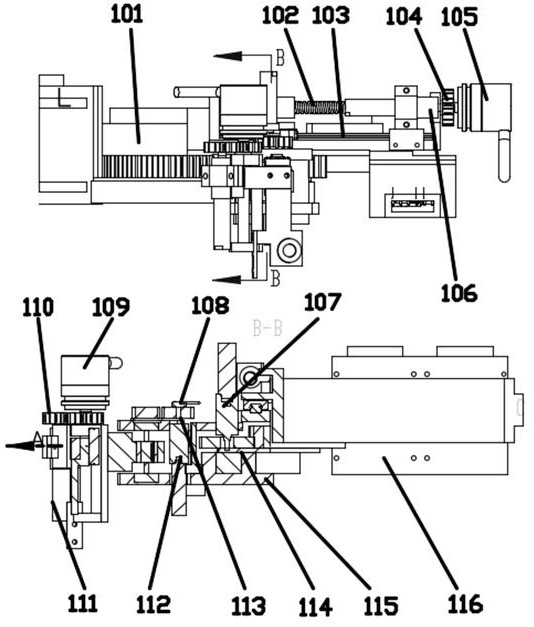
[0048] like Figures 2a-2c As shown, the lifting claw 10 includes a first gripper 101, a first screw nut mechanism 102, a first linear guide 103, a first gear transmission mechanis...
Embodiment 2
[0070] A control method for a climbing and spanning robot between tubes, specifically:
[0071] S1, control at least one of the first hand 101 of the lifting claw 10 and the second hand 301 of the non-lifting claw 30 to support the corresponding pipe;
[0072] S2, control the body 20 to rotate forward or backward to an appropriate angle relative to the first hand 101 or the second hand 301 supported by the rotating joint, and control the non-lifting claw 30 or the lifting claw 10 to extend through the linear telescopic mechanism of the body 20 Lengthen or shrink into position to find the next pipe to clamp.
[0073]When the first claw 101 of the lifting claw 10 supports the pipeline, the lifting transmission mechanism 110 of the lifting claw 10 is controlled to work, so that the body 20 and the non-lifting claw 30 move as a whole along the axis of the pipeline.
[0074] like Image 6 As shown, it is an application scenario of the embodiment of the present invention. An embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More