

Multi-line laser radar road boundary line extraction method
A multi-line laser, extraction method technology, applied in radio wave measurement systems, instruments, measurement devices, etc., can solve problems such as affecting the extraction of road boundary lines, increasing the number of empty grids, and affecting the accuracy of road boundary line extraction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
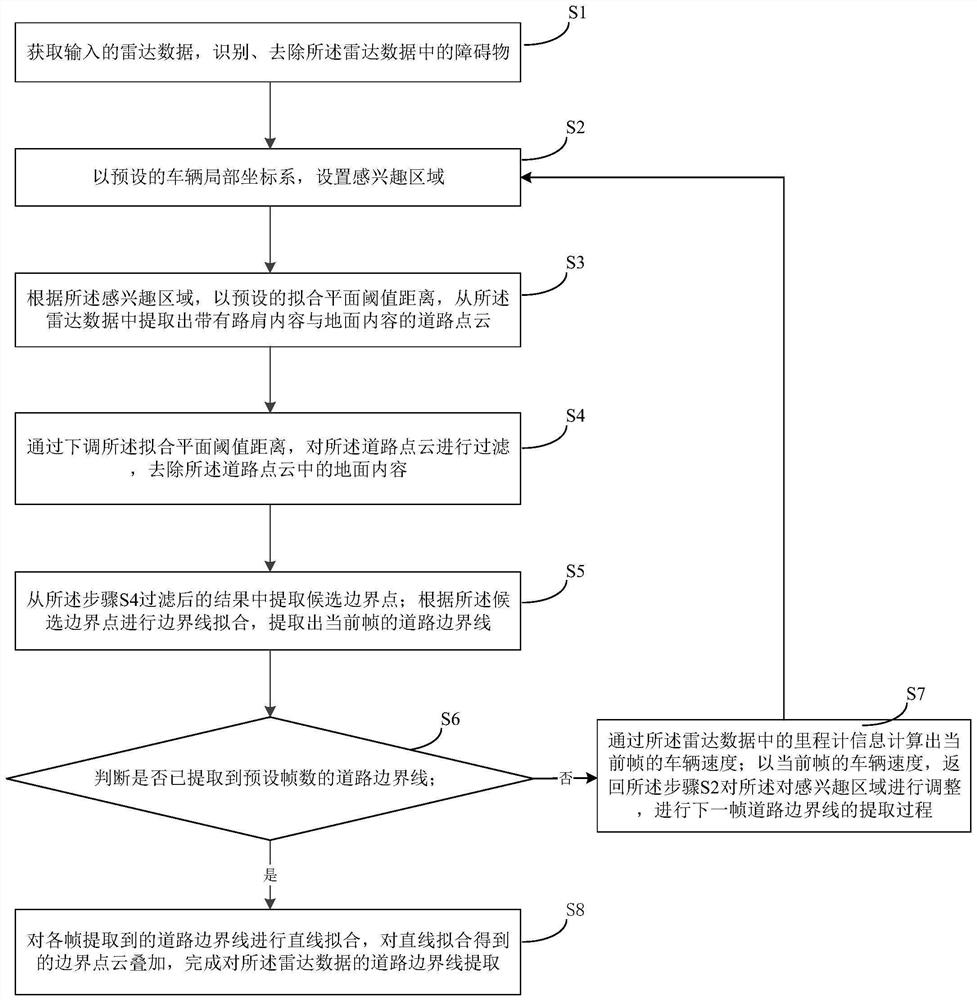
[0050] Please refer to figure 1 , a multi-line lidar road boundary line extraction method, comprising the following steps:
[0051] S1, obtain input radar data, identify and remove obstacles in the radar data;
[0052] S2, set the region of interest with the preset vehicle local coordinate system;
[0053] S3, extracting a road point cloud with road shoulder content and ground content from the radar data with a preset fitting plane threshold distance according to the region of interest;
[0054] S4, by lowering the fitting plane threshold distance, filtering the road point cloud to remove the ground content in the road point cloud;
[0055] S5, extracting candidate boundary points from the result filtered in step S4; performing boundary line fitting according to the candidate boundary points, and extracting the road boundary line of the current frame;
[0056] S6, determine whether the road boundary line of the preset number of frames has been extracted; if not, execute ste...
Embodiment 2
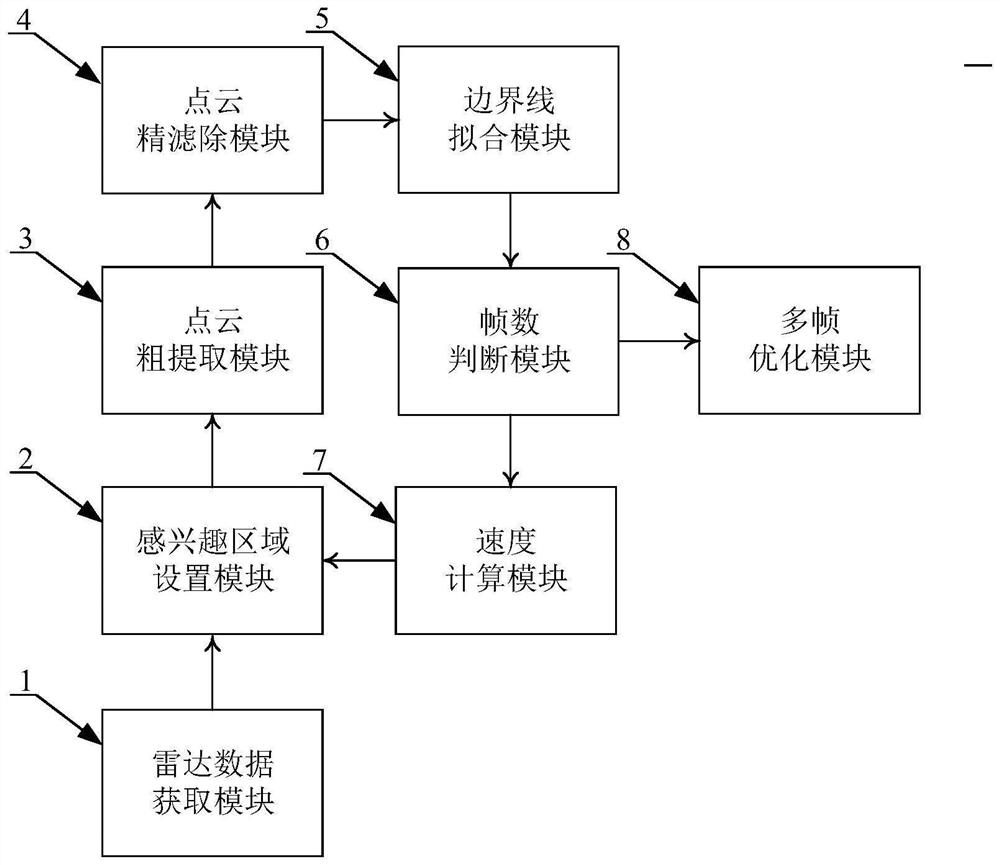
[0089] A multi-line lidar road boundary line extraction system, see image 3 , including radar data acquisition module 1, region of interest setting module 2, point cloud coarse extraction module 3, point cloud fine filtering module 4, boundary line fitting module 5, frame number judgment module 6, speed calculation module 7 and multi-frame The optimization module 8; the region of interest setting module 2 is connected to the radar data acquisition module 1, the point cloud rough extraction module 3 and the speed calculation module 7; the point cloud fine filtering module 4 is connected to the point cloud rough extraction module 3 and boundary line fitting module 5; Described frame number judgment module 6 connects described boundary line fitting module 5, speed calculation module 7 and multi-frame optimization module 8; Wherein:
[0090] The radar data acquisition module 1 is used for acquiring input radar data, identifying and removing obstacles in the radar data;
[0091] ...
Embodiment 3
[0099] A storage medium having a computer program stored thereon, and when the computer program is executed by a processor, implements the steps of the method for extracting a road boundary line of a multi-line laser radar in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More