

Flexible endoscope minimally invasive surgery instrument arm
A minimally invasive surgery and instrument arm technology, applied in the field of medical equipment, can solve problems such as poor operational flexibility and lack of freedom, and achieve the effects of reasonable layout, miniaturization, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
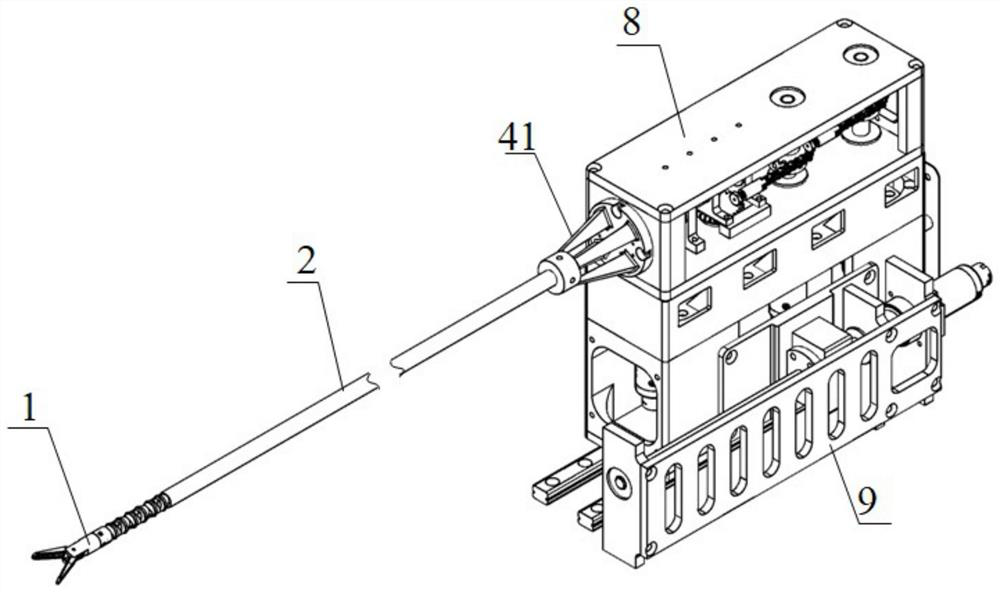
[0037] Example 1: as figure 1 As shown, a flexible endoscopic minimally invasive surgical instrument arm includes a front-end execution device 1, a continuum sleeve 2, a flexible wire shaft 3 and a flexible wire shaft drive device 6; wherein:
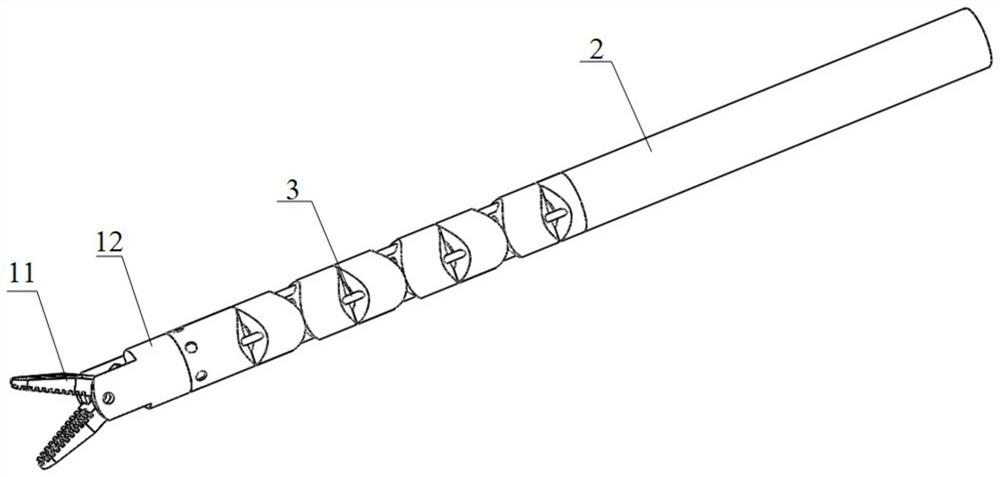
[0038] like Figures 1 to 3 As shown, the front-end actuator 1 is connected to one end of the flexible wire shaft 3, and the other end of the flexible wire shaft 3 passes through the continuum casing 2 and is connected to the flexible wire shaft driving device 6, and the flexible wire shaft driving device 6 6 It can drive the flexible wire shaft 3 to rotate, and drive the front-end actuator 1 to rotate around its own axis.
[0039] In this embodiment, by arranging a flexible wire shaft 3 connected to the front-end actuator 1 inside the continuous casing 2 , the flexible wire shaft 3 can drive the front-end actuator 1 under the driving of the flexible wire shaft driving device 6 . The 360° rotation around the axis makes the front-end a...
Embodiment 2
[0045] Example 2: as Figures 1 to 3 As shown, in order to avoid axial play when the front-end actuator 1 rotates around the axis, the present invention continues to improve as follows on the basis of Embodiment 1:
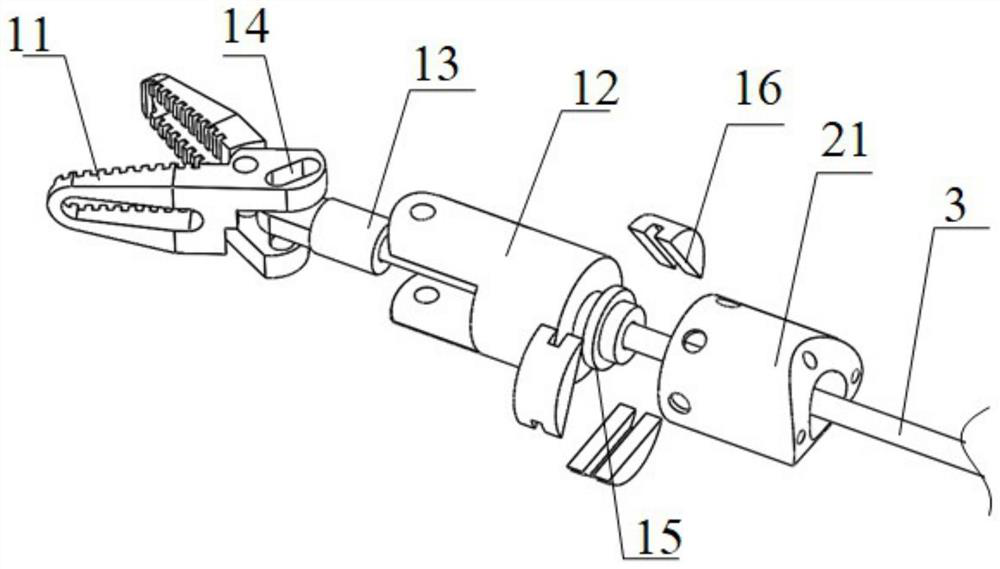
[0046] like image 3 As shown, an annular raised portion 15 is provided at one end of the front-end actuator 1 close to the continuum sleeve 2; the continuum sleeve 2 is provided with an annular groove corresponding to the annular raised portion 15, The front-end actuator 1 is installed in clearance fit with the annular groove provided in the continuum casing 2 through the annular protrusion 15, and can be driven by the wire flexible shaft drive device 6 to realize shaftless rotation around its own axis. move to.
[0047] Specifically, as image 3 As shown, as one of the embodiments, one end of the continuous body sleeve 2 close to the front end effector 1 is internally provided with three limit blocks 16 arranged circumferentially and spaced 120° from each oth...
Embodiment 3
[0048] Example 3: as Figures 1 to 3 As shown, the present invention focuses on providing a flexible endoscopic minimally invasive surgical instrument arm when the front-end execution device is a surgical forceps, and further improvement is made on this basis, so that the surgical forceps assembly not only has the degree of freedom of rotation, but also It has the degree of freedom of opening and closing, and the specific structure settings are as follows:
[0049] like image 3 As shown, the surgical forceps assembly includes two jaws 11, a forceps head 12, and a push rod 13 for pushing and pulling the two jaws 11 to realize the opening and closing of the jaws, wherein: the two jaws 11 and the forceps head 12 Installed and fixed by cylindrical pins; the push rod 12 is arranged inside the pliers head 11 and connected with the wire flexible shaft 3; the two pliers 11 are respectively provided with chute 14, the front end of the push rod 13 The two sliding grooves 14 of the tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More