

Medical robot operating device
An operating device and robot technology, applied in the field of medical robots, can solve the problems of poor operability of delivery interventional instruments, and achieve the effect of precise control of the progressive distance and real operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
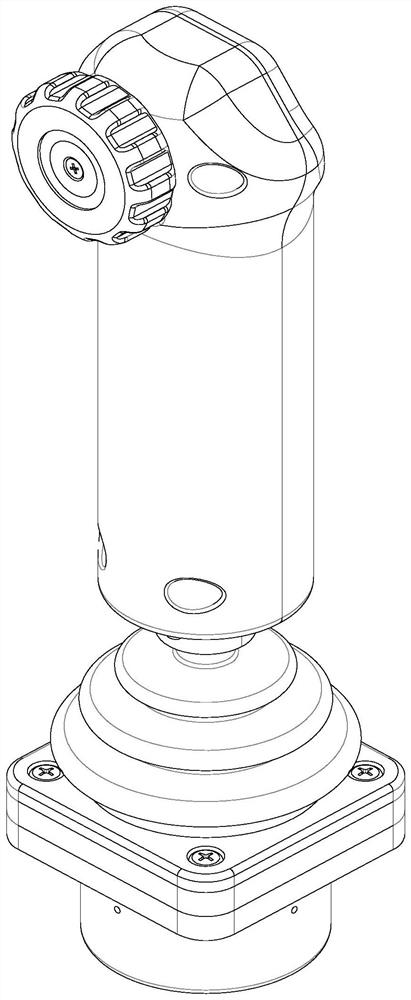
[0041] like figure 1 As shown, the embodiment of the present invention provides a medical robot operating device, including a rotating part 1, a transmission part 2, a passive part, a sensor 3 and a casing.
[0042] The rotating part 1 is installed outside the casing;
[0043] The passive component is installed in the housing, and the rotating component 1 drives the passive component to rotate through the transmission component 2;
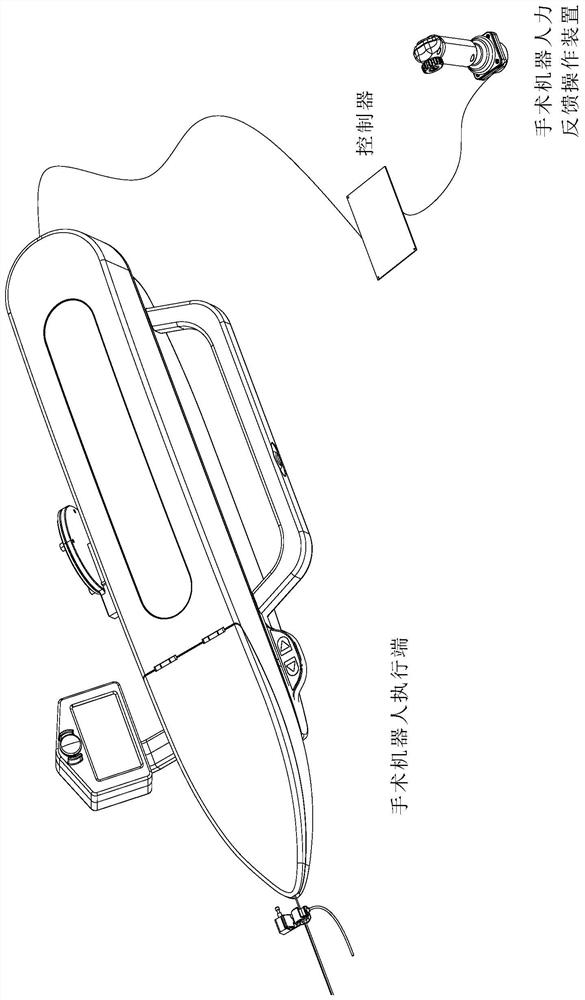
[0044] The sensor 3 is installed in the housing to monitor the real-time motion state of the passive components, such as figure 2 As shown, it is then transmitted to an external controller, where the controller controls the execution end of the medical robot to perform the operation of delivering the interventional instrument.
[0045]It should be noted that: first, the sensor 3 may be a magnetic encoder (either absolute or incremental), or a photoelectric encoder (either absolute or incremental). Exemplarily, in the embodiment of the present i...
Embodiment 2
[0052] In the technical aspect of Embodiment 1, further: the passive component includes a damping device, and the damping device generates a damping force for providing force feedback to the rotating component 1 during the rotational movement.
[0053] At present, when delivering guidewires, catheters, balloons or stents, interventional medical robots on the market use images to display the maximum resistance threshold or display real-time resistance values, but cannot feed back force information to the control end. Doctors cannot intuitively feel the resistance, which greatly reduces the surgical coverage of the product.
[0054] In order to cope with this technical defect, the passive component in the embodiment of the present invention can be set as a damping device, and the damping device generates a damping force for providing force feedback to the rotating component 1 during the rotating motion, so that the doctor can intuitively Feel the resistance of the interventional...
Embodiment 3
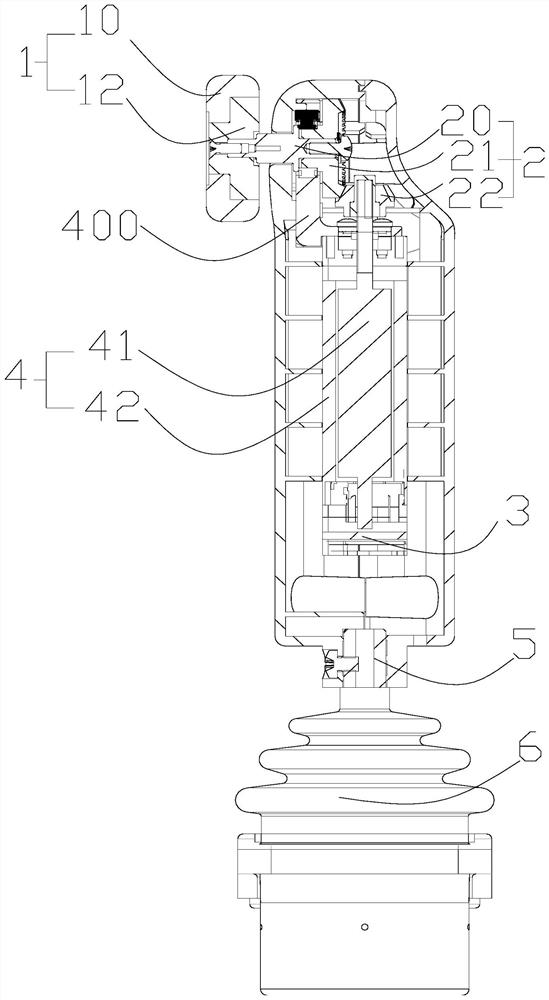
[0057] like image 3 As shown, in the technical aspect of Embodiment 2, further: the damping device includes a magnetic damper 4, and the magnetic damper 4 includes a reluctance rotor 41 and a reluctance stator 42; the reluctance stator 42 is energized After a magnetic field is formed, the reluctance rotor 41 generates a magnetic damping force for providing force feedback to the rotating component 1 during the rotating motion in the magnetic field.
[0058] That is, in this embodiment, the damping device is the magnetic damper 4 as an example.
[0059] When the interventional robot is working, when the doctor grips the control housing (handle) and slides the roller 11 clockwise or counterclockwise, the driving wheel 22 is driven to rotate. The driving wheel 22 drives the driven wheel 23 to rotate, and the driven wheel 23 is fixedly connected with the reluctance rotor 41, thereby driving the reluctance rotor 41 to rotate (the process generates a magnetic damping force), and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More