Joint robot of automatic material turning numerical control equipment
A numerical control equipment and automatic material turning technology, applied in the direction of comprehensive factory control, metal processing, etc., can solve the problems of reducing processing technology circulation and unevenness, and achieve the effect of reducing processing technology circulation and reducing stacking space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
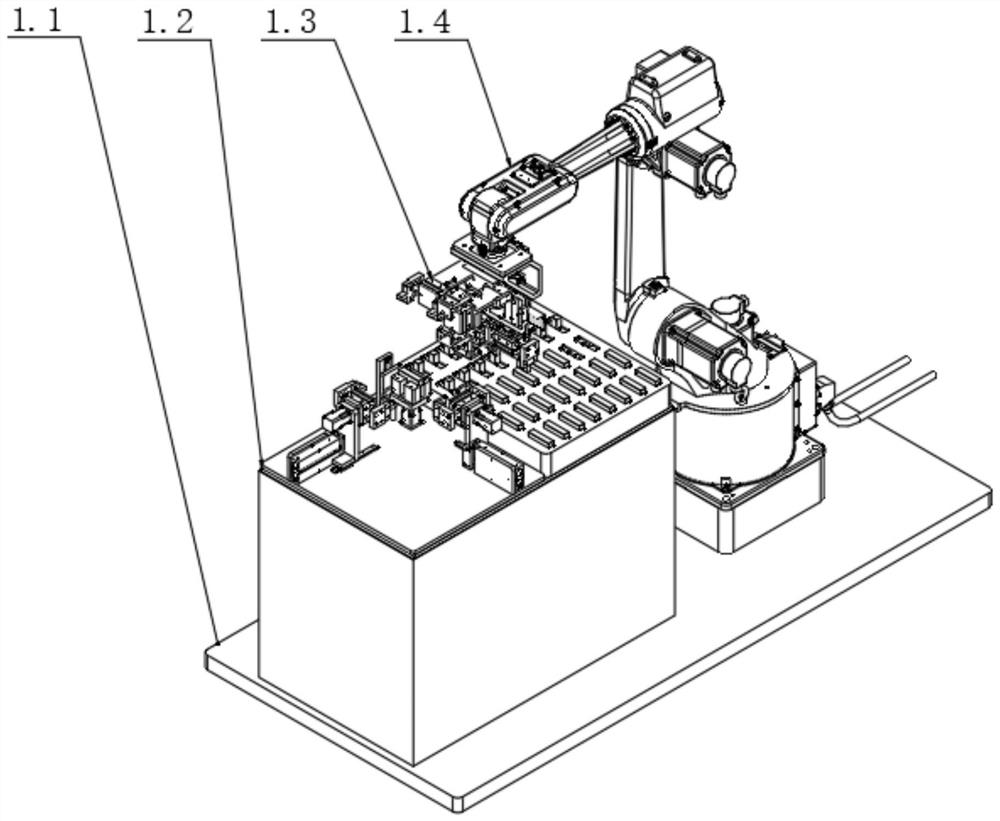
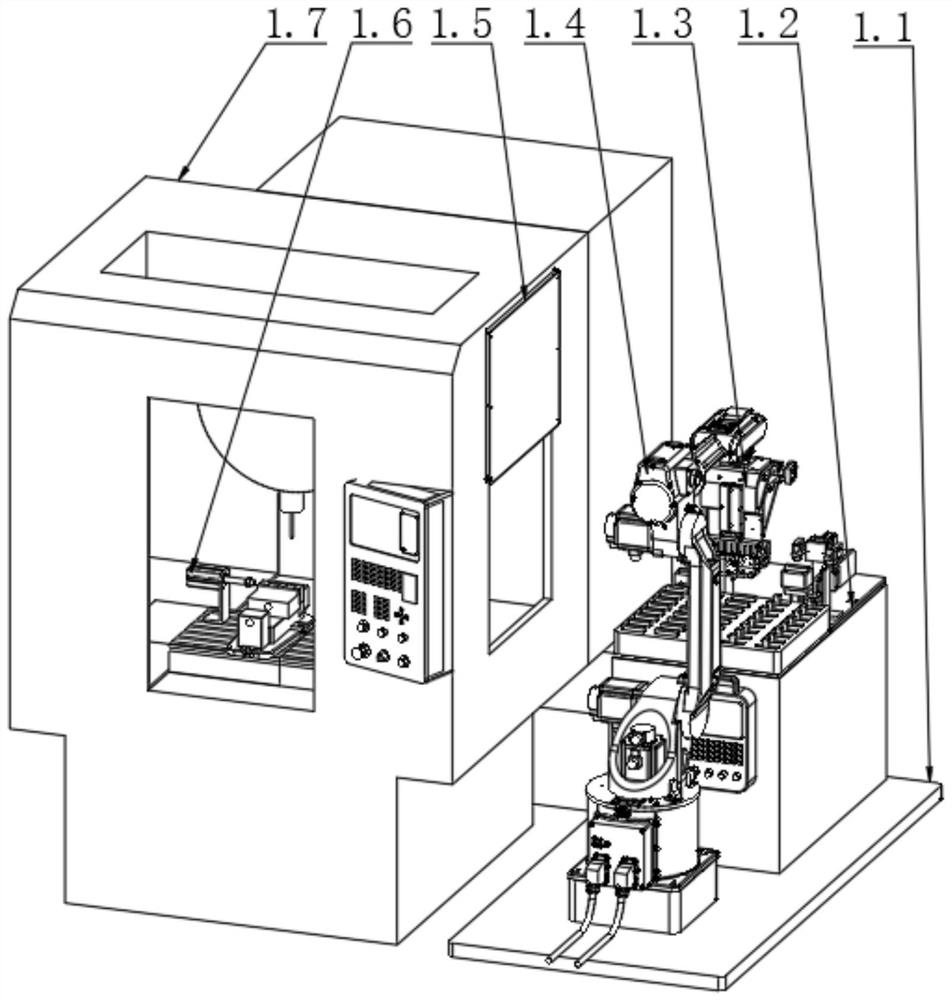
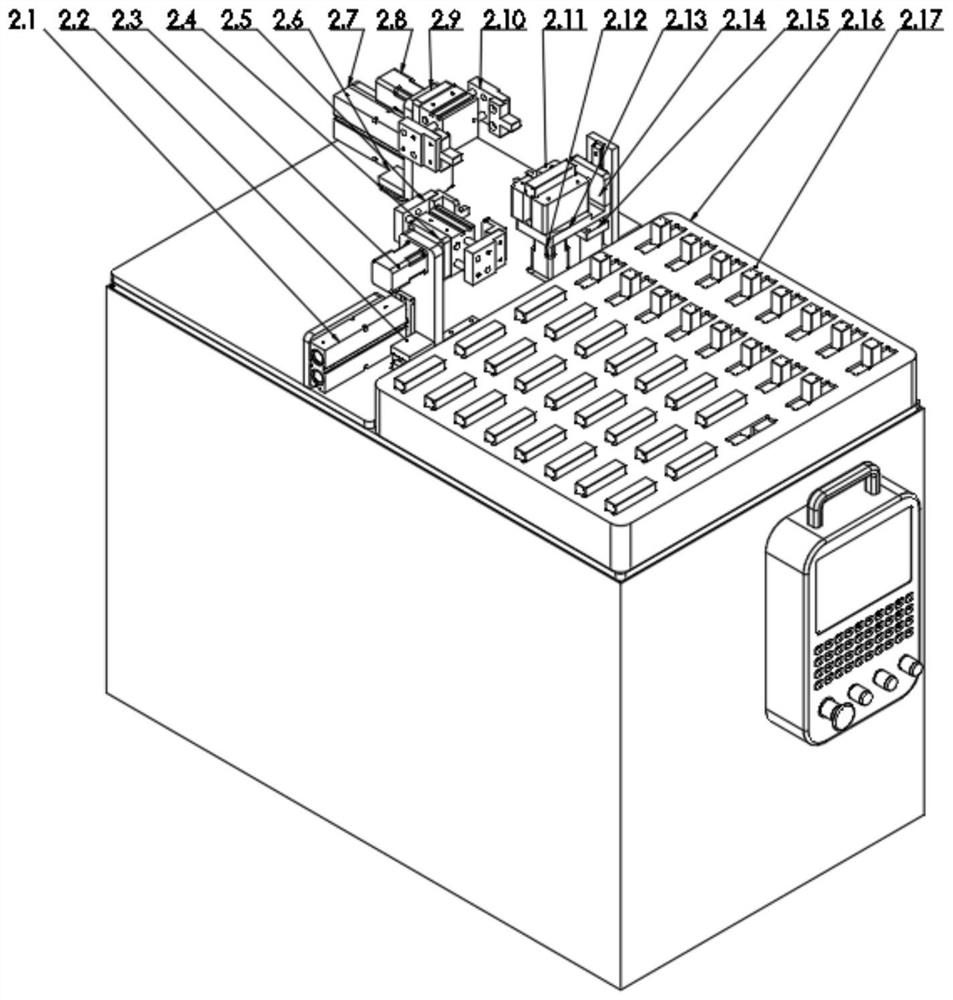
[0042] see Figure 1-2 , automatic turning over CNC equipment joint robot, including a first fixed bracket 1.1, the outer end of the first fixed bracket 1.1 is respectively equipped with a joint robot body 1.4 and a second fixed bracket 1.2, the upper end of the joint robot body 1.4 is equipped with a clamping jaw The grasping mechanism 1.3, the outer end of the joint robot body 1.4 is equipped with a numerical control device 1.7, the numerical control device 1.7 is provided with an auxiliary positioning mechanism 1.6, the outer end of the numerical control device 1.7 is equipped with a numerical control device telescopic door 1.5, on the second fixed bracket 1.2 The automatic turning mechanism of the processing surface, the rotating mechanism of the positioning surface and the material tray 1 2.16 are respectively installed, and the workpiece body 2.17 is arranged on the material tray 1 2.16. In this scheme, a multi-unit for turning the workpiece body 2.17 is added on the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More