

Automatic driving vehicle trajectory planning method in mixed traffic flow environment
A technology of automatic driving and vehicle trajectory, which is applied in the direction of combustion engine, internal combustion piston engine, mechanical equipment, etc., can solve the problems of difficult solution and low calculation efficiency, and achieve the goal of reducing parking and delay, improving traffic efficiency and improving planning efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
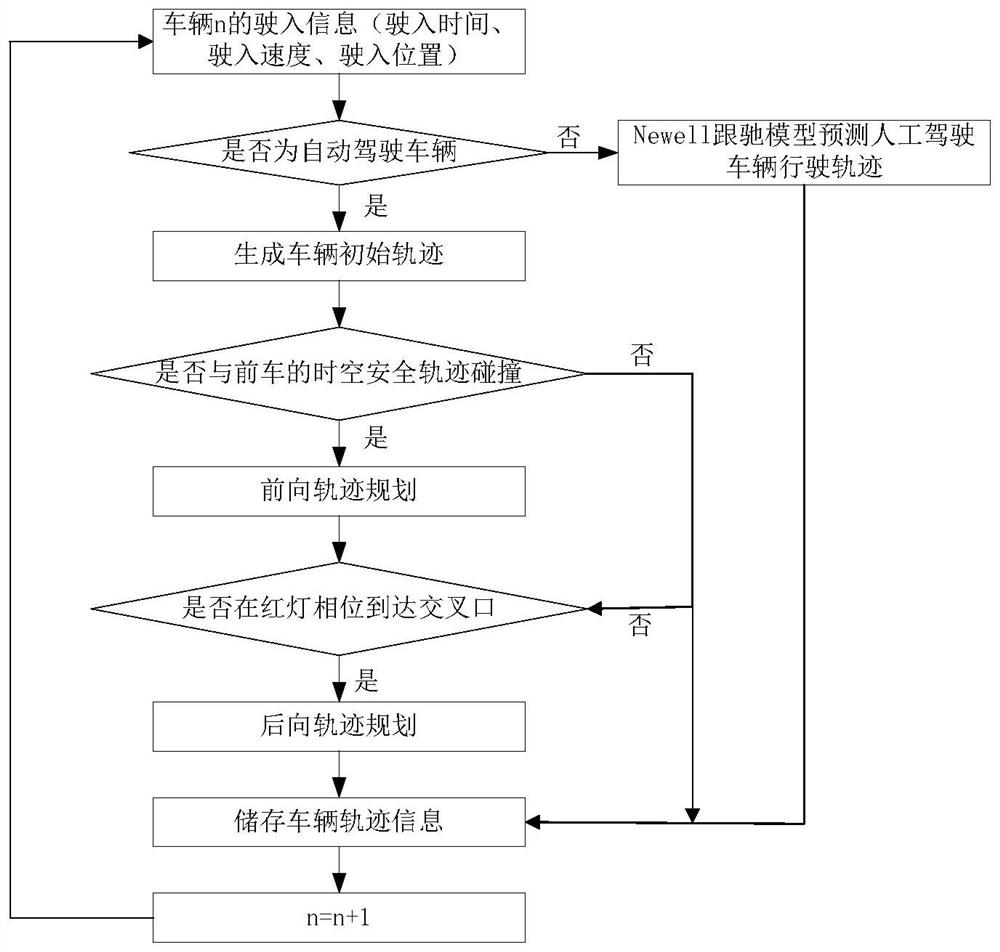
[0078] like figure 1 As shown, the present invention provides a real-time planning method for the trajectory of an autonomous vehicle at a signal-controlled intersection in a mixed environment of manual and automatic driving, comprising the following steps:
[0079] S1: When the nth vehicle is detected in the signalized intersection control area, the entry information of vehicle n is collected, including the entry time, entry speed an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More