

Gantry crane girder camber deformation compensation method and system and computer medium
A deformation compensation, crane technology, applied in neural learning methods, design optimization/simulation, load suspension components, etc., can solve the problems of linear encoder measurement error without compensation, large measurement error, and lifting height without compensation, etc., to achieve Optimize positioning accuracy and expand the effect of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
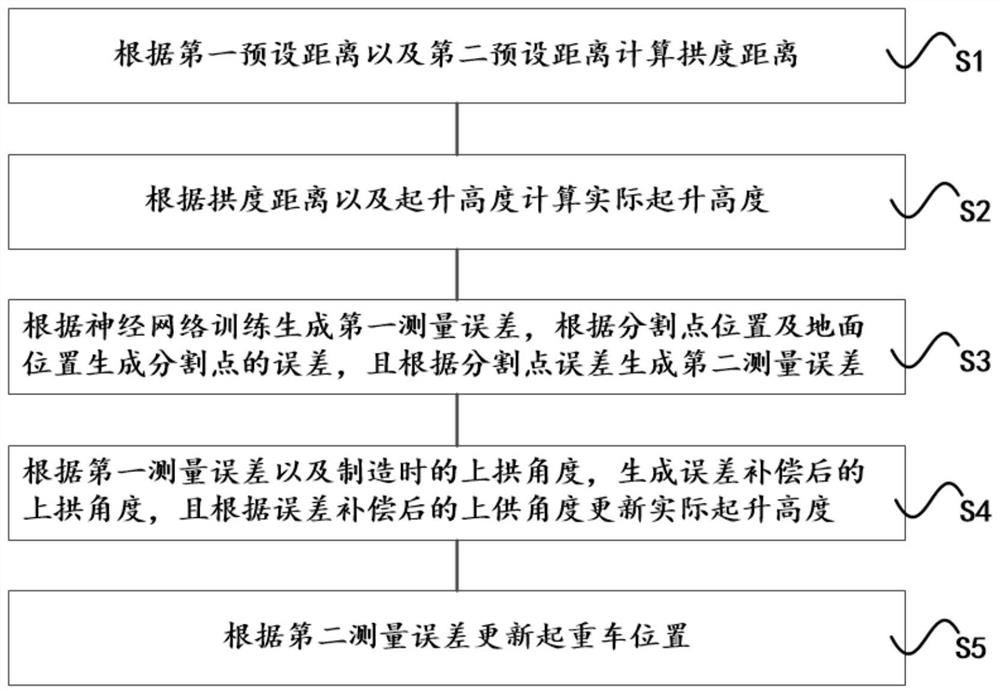
[0047] refer to Figure 1-3 As shown, the present invention provides an embodiment of a method for compensating the camber deformation of the main girder 10 of a bridge gantry crane, and the method includes the following steps:
[0048] Step S1: Calculate the crown distance according to the first preset distance c and the second preset distance d
[0049] Step S2: According to the crown distance Δh and the lifting height h 1 Calculate the lifting height h 2 =h 1 +Δh;
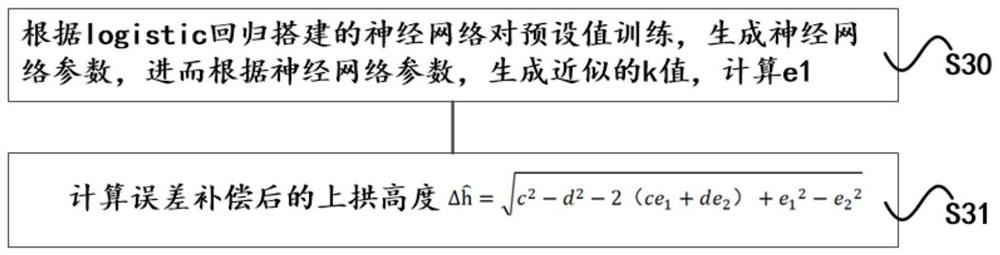
[0050] Step S3: Generate the first measurement error e according to the neural network training method 1 , according to the step length to divide the code ruler to generate several division point positions d i , and then according to the split point position d i and ground position g i Generate the error e for each split point2[i] , and according to the split point error e 2[i] Generate the second measurement error e 2 ;
[0051] Step S4: According to the first measurement error e 1 and the upper ar...
Embodiment 2
[0071] refer to figure 1 , Figure 4 As shown, the present invention also provides an embodiment of the camber deformation compensation system for the main girder 10 of the bridge gantry crane, including:
[0072] The distance calculation module 4 calculates the camber distance according to the first preset distance and the second preset distance, and then calculates the actual hoisting height according to the camber distance and the hoisting height;
[0073] The error calculation module 5 generates a first measurement error according to the neural network training method, generates a plurality of segmentation point positions according to the step size segmentation code ruler, and then generates the error of each segmentation point according to the segmentation point position and the ground position, and generates the error of each segmentation point according to the segmentation point error. generating a second measurement error;
[0074] The compensation module 6 generates...
Embodiment 3
[0079] The present invention also provides a computer medium, where a computer program is stored on the computer medium, and the computer program is executed by a processor to realize the above-mentioned method for compensating the camber deformation of the main girder 10 of a bridge gantry crane.
[0080] The present invention also provides a computer, including the above-mentioned computer medium.
[0081] As will be appreciated by those skilled in the art, the embodiments of the present application may be provided as a method, a system, or a computer program product. Accordingly, the present application may take the form of an entirely hardware embodiment, an entirely software embodiment, or an embodiment combining software and hardware aspects. Furthermore, the present application may take the form of a computer program product embodied on one or more computer-usable storage media (including, but not limited to, disk storage, CD-ROM, optical storage, etc.) having computer-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More