

Apparatus for positioning surgical instrument
A surgical operation and instrument technology, which is applied in the directions of stereotaxic surgical instruments, surgical robots, and operations, can solve the problems of inaccurate positioning of instruments, endanger the success of surgical procedures, and time-consuming, and achieve the effect of reducing the requirements for precise positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
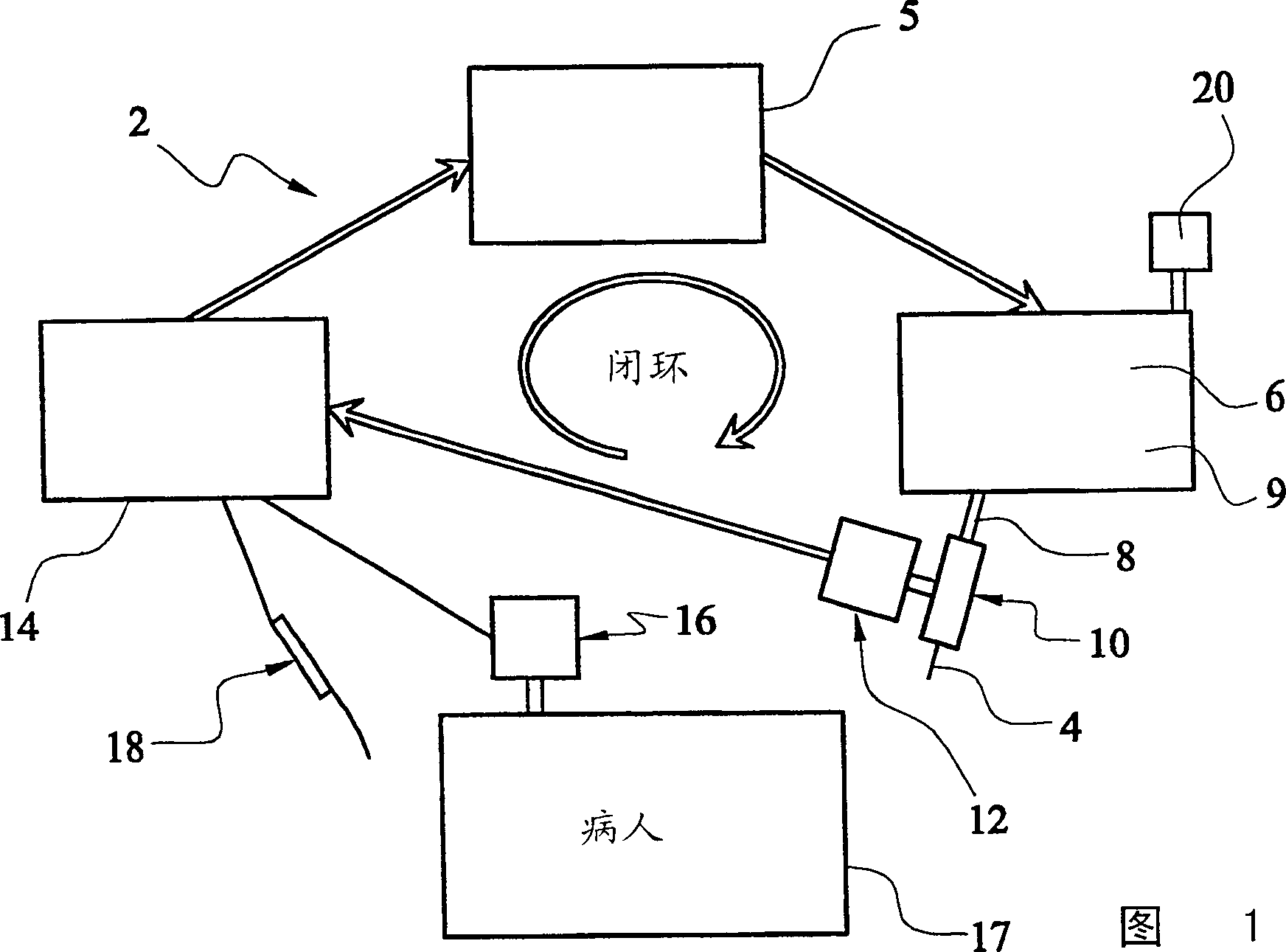
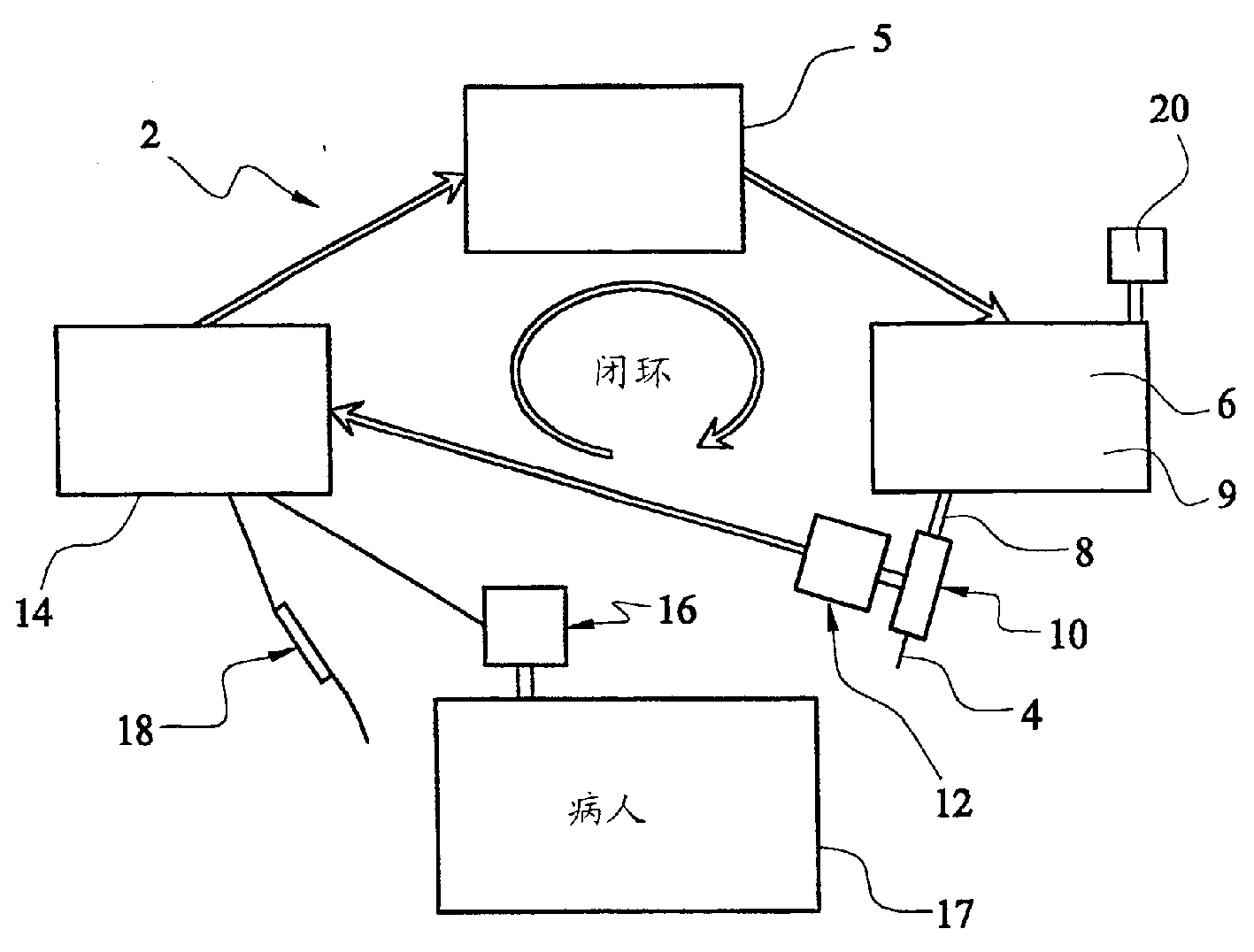
[0029] Referring to the drawings, FIG. 1 is a schematic representation of an apparatus 2 that may be used to position a surgical instrument 4 . The device comprises a computer 5 and a robot control system 6 which can receive instructions generated by the computer to move the apparatus. The control system includes a robotic arm (or other robotic system) 8 having a mounting plate 10 at the end on which the instrument 4 is mounted. The robotic arm 8 is fixed to a stationary base 9 of the control system. The instructions to move the instrument are interpreted by the robotic control system and cause movement of the instrumented robotic arm relative to the stationary base 9 . Preferably, said robot arm has at least three joints, more preferably six joints, in order to allow sufficient freedom of movement of said assembly plate 10 . Such general robot control systems are known, see eg US-6033415 and WO-98 / 27877.
[0030] The robot arm has an instrument sensor 12 on its mounting pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More