

Robot straight line track characteristeric measuring method and measurer used thereof
A measurement method and robot technology, applied in the field of robots, to achieve the effect of low cost, practical technology, and reasonable principle of position measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
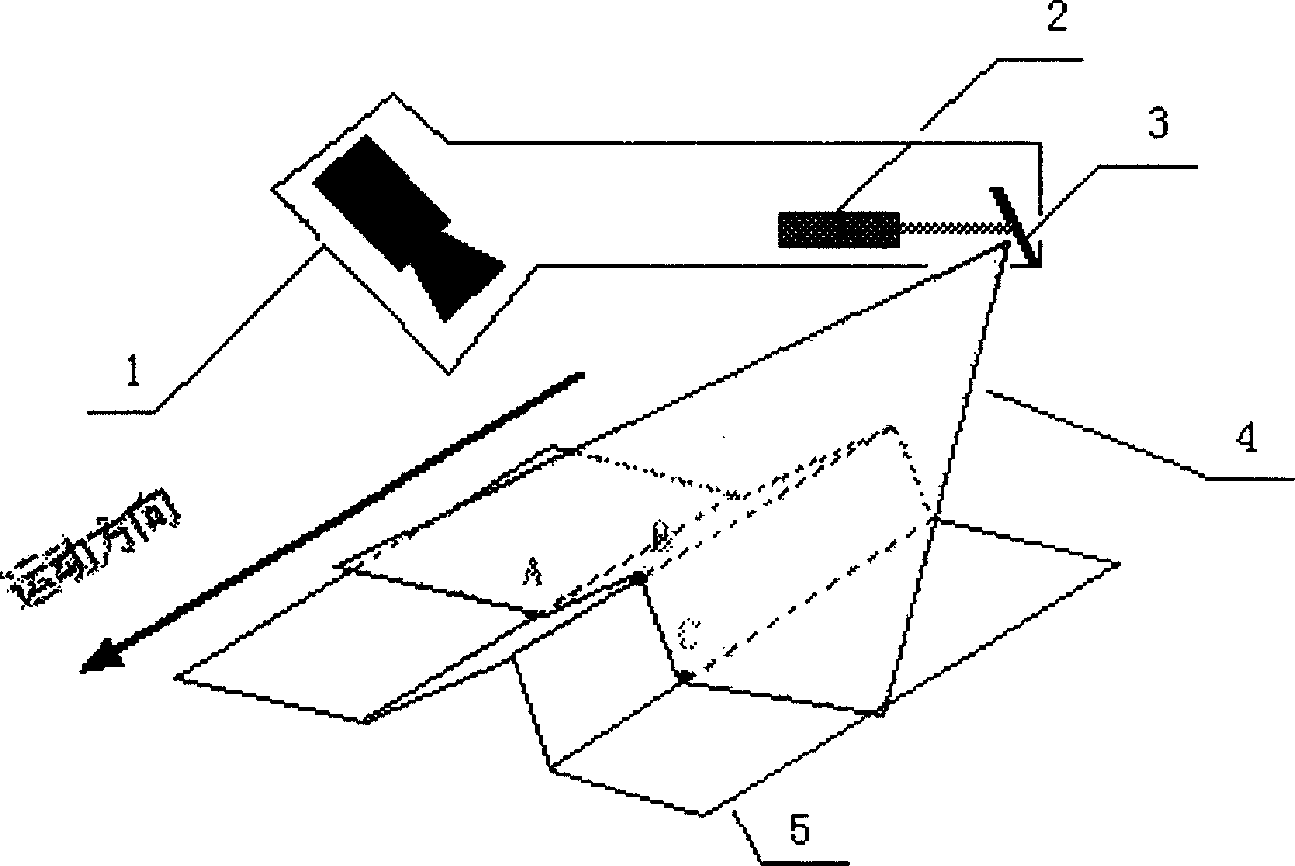
[0028]Using the principle of structured light 3D visual measurement, the combination of line structured light and CCD camera is used to form a sensor to form a geometric model of structured light reflection imaging. The sensor scans and images the reference object continuously in motion, and uses visual image processing technology to calculate The continuous pose relationship of the sensor relative to the reference object coordinate system; when the sensor is installed on the end joint of the robot and moves along a straight line in the reference object coordinate system, this continuous pose relationship reflects the position of the robot end when it moves in a straight line. Trajectory status, in order to realize the detection of the straight-line trajectory performance of the robot.
[0029] Such as figure 1 As shown, the measuring device is made of sensors (CCD camera, laser, reflector and mounting bracket) and measuring rails, wherein: the CCD camera, laser and reflector ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More