

System and method for robot targeting under fluoroscopy based on image servoing
A fluoroscopic and robotic technology, applied in surgical robots, surgical navigation systems, sensors, etc., can solve the problems of codes that do not provide the position and orientation of the C-arm, difficult and complex problems for patients, and achieve the effect of simple and repeatable operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] For a discussion of the advantages and disadvantages of "uncalibrated" display methods, see Hager, G., Hespanha, J., Dodds, Z., Morse. A.S., "What Tasks Can Be Performed with an Uncalibrated Stereo Vision System?", IJCV 35( 1): pp.65-85, Nov. 1999, the contents of which are incorporated herein by reference.
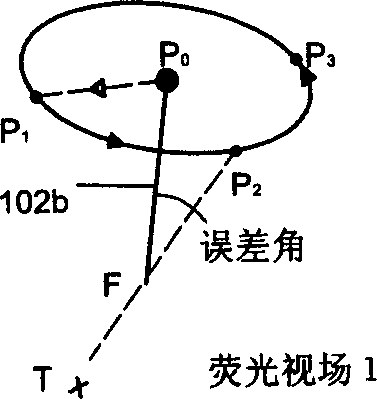
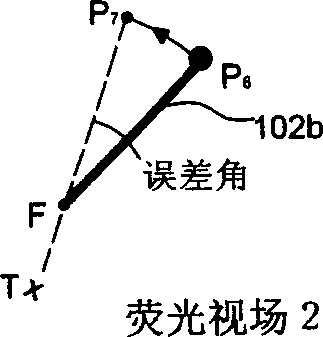
[0024] The "uncalibrated" method is based on the technique used by experienced surgeons when performing manual needle insertion under fluoroscopy. Based on this technique, a calibration method was developed for percutaneous needle insertion based on superimposing the needle on the target, namely the renal pelvis. See the above article by Stoianovivi et al. (1997).
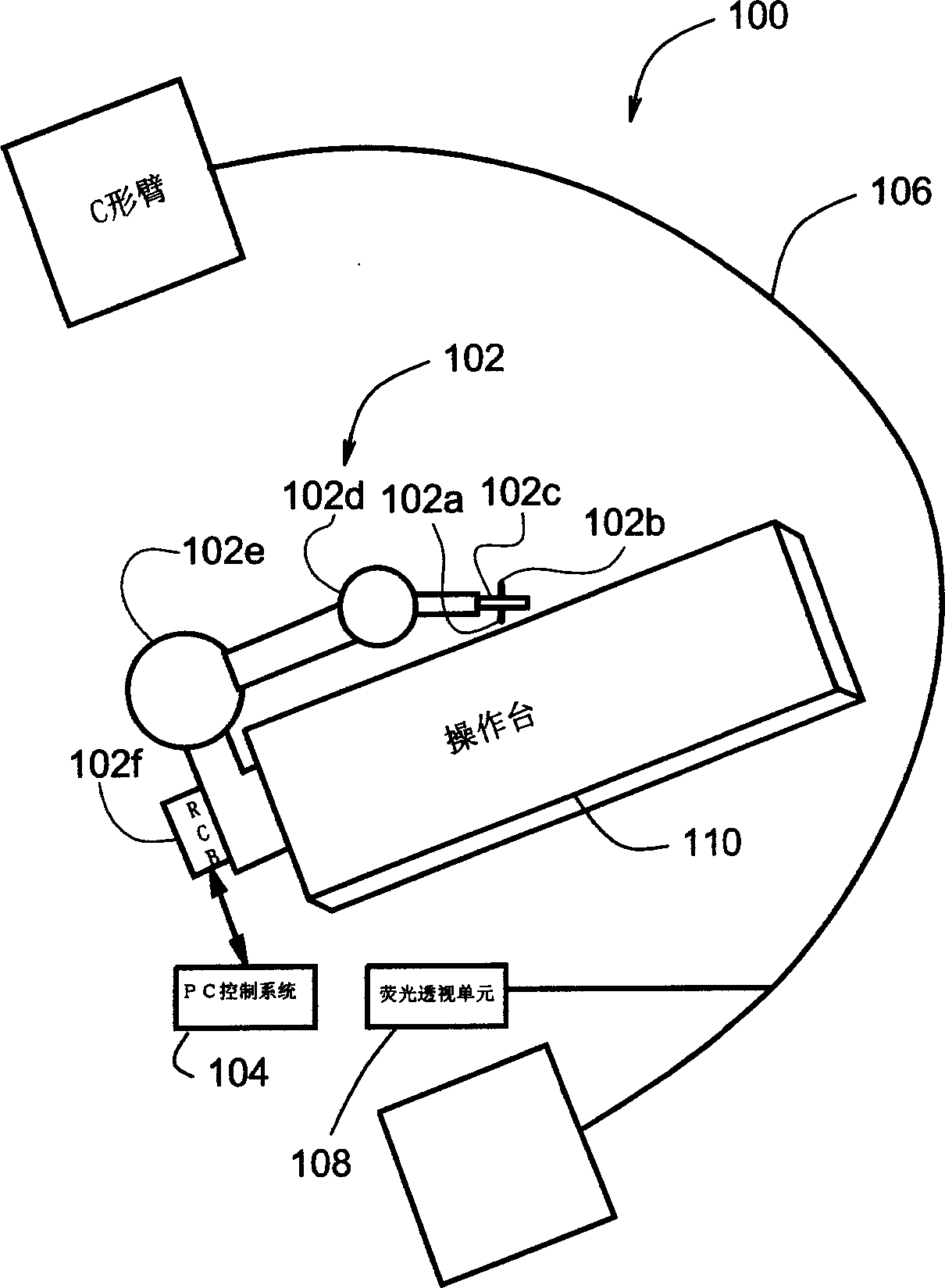
[0025] The above approach was implemented on the Percutaneous Kidney Access (PAKY) needle driver, which was subsequently augmented with a Remote Center for Motion (RCM) robot and GRAY support arm technology. See Stoianovici, D., Witcomb, L.L., Anderson, J.H., Taylor, R.H., Kavoussi, L.R.: "AModular Su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More