

Robot programmable infrared obstacle avoidance apparatus
A robot and obstacle avoidance technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of occupying physical space, large volume, poor ability to suppress interference, etc., to achieve physical space reduction, high integration, and anti-interference strong interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below with reference to the accompanying drawings.
[0020] Before the present invention is further described in detail with reference to the accompanying drawings and specific embodiments, several abbreviations frequently used in the art and their full names in Chinese and English are listed first, and a brief description is given.
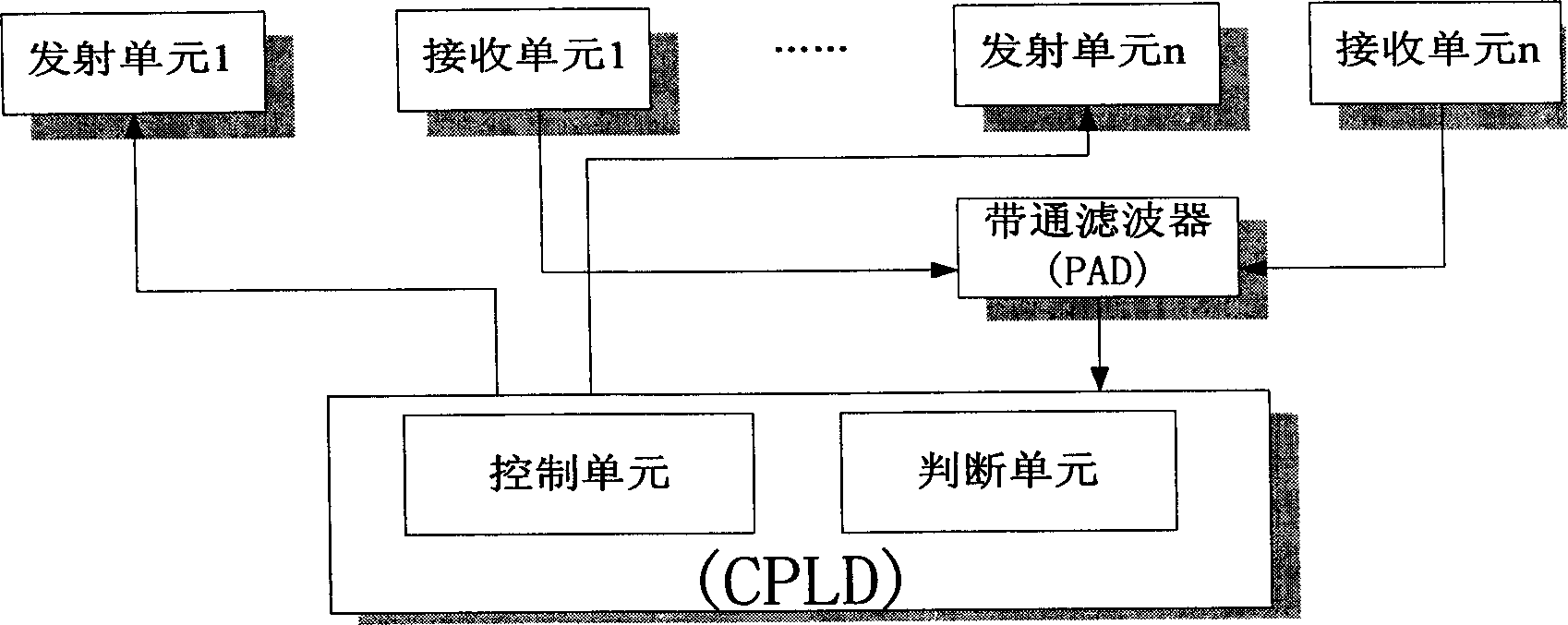
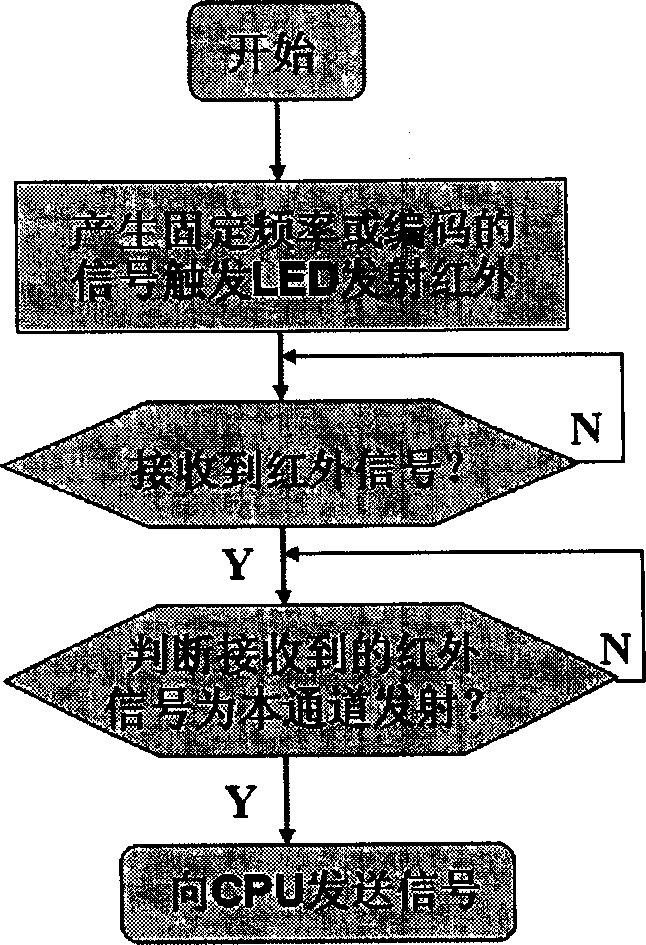
[0021] CPLD - Complex Programmable Logic Device (Complex Programmable Logic Device);
[0022] FPGA-Field Programmable Gate Array (Field Programmable Gate Array);
[0023] PAD-Programmable Analog Device;
[0024] JTAG-Joint Test Action Group;
[0025] CPU - Central Processing Unit.
[0026] CPLD is developing very rapidly, its capacity is getting larger and larger, its use is becoming more and more common, and its relative price is also decreasing, and it is widely used in modern circuit design. Recently, PAD has also received more and more attention. Its flexible use and simple programm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More