

Track autopilot control system and method thereof
A technology of control system and autopilot, applied in general control system, control/adjustment system, adaptive control, etc., can solve the problem of inability to realize track control, etc., and achieve the effect of good adaptive ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
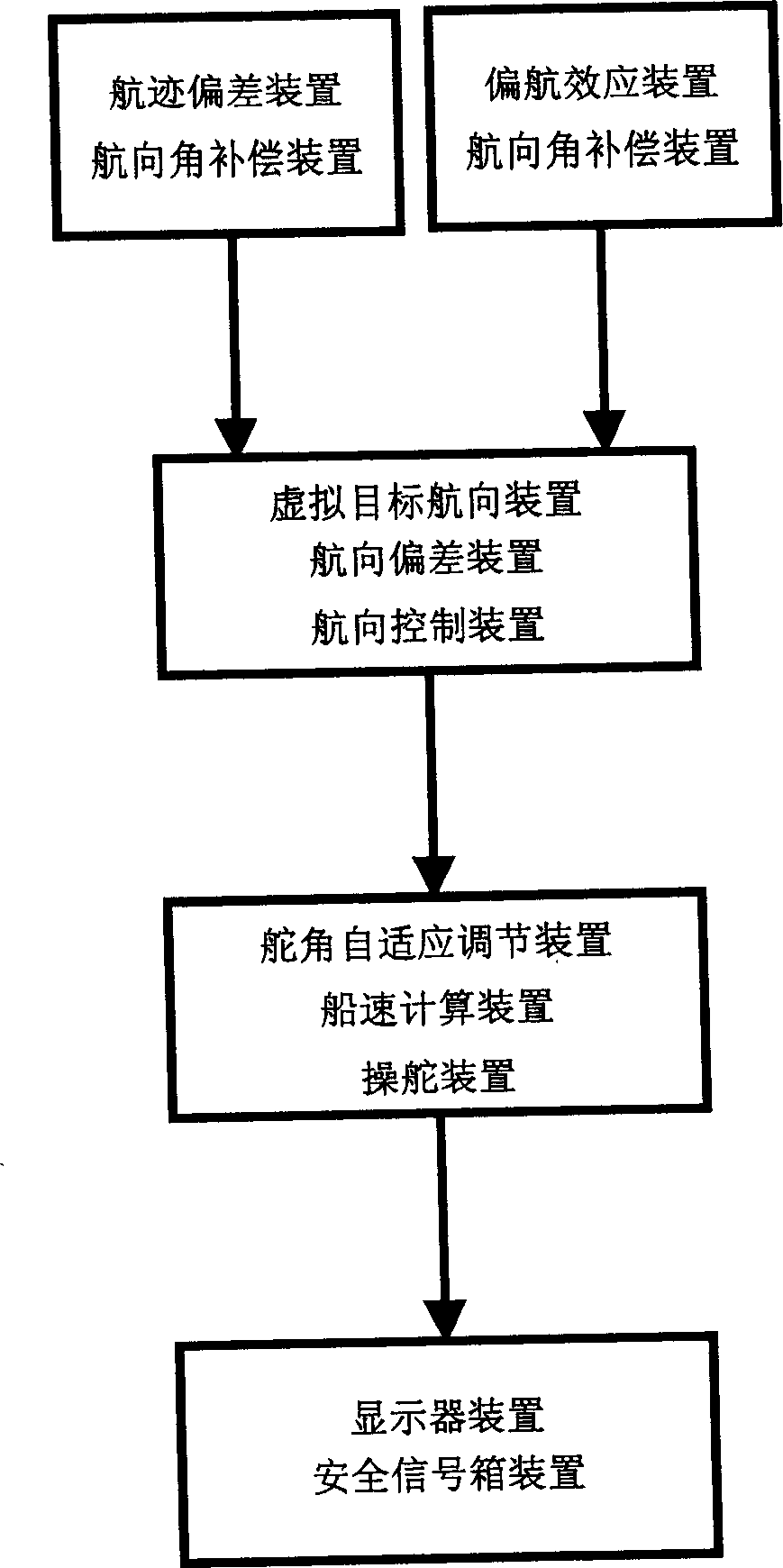
[0018] The main devices of the track autopilot control system will be further described below in conjunction with the accompanying drawings.
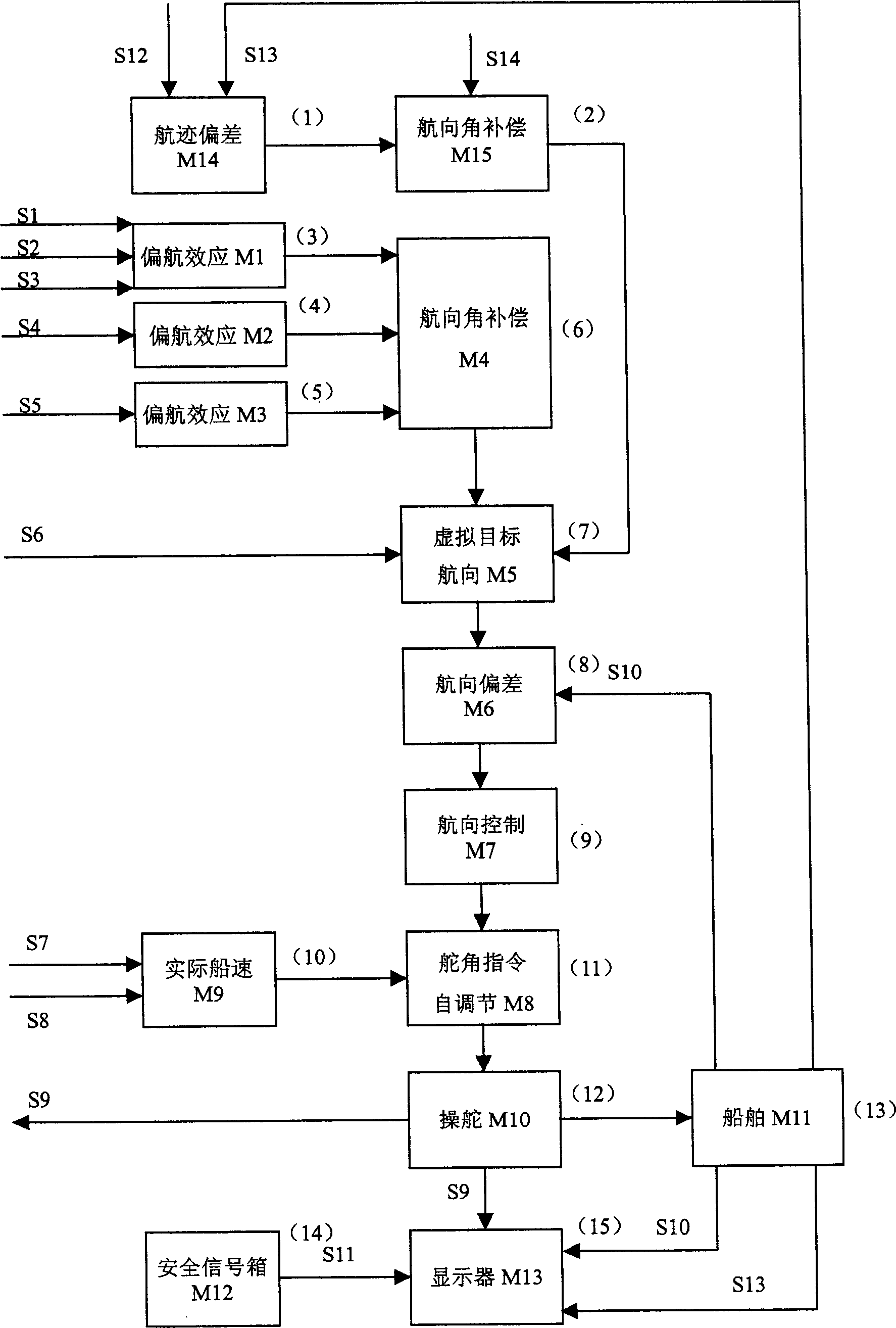
[0019] figure 2 Among them, the functional device includes a yaw effect device M1, a yaw effect device M2, a yaw effect device M3, a heading angle compensation device M4, a virtual target heading device M5, a heading deviation device M6, a heading control device M7, and a rudder angle command self-adjustment Device M8, ship speed calculation device M9, steering device M10, ship device M11, safety signal box device M12, display device M13, track deviation device M14, course angle compensation device M15.
[0020] Signal S1 indicates wind direction, S2 indicates wind speed, S3 indicates ship condition, S4 indicates sea wave, S5 indicates sea current direction, S6 indicates target course, S7 indicates ship speed, S8 indicates sea current speed, S9 indicates rudder angle, S10 indicates actual course, S11 indicates alarm Signal, S12 repres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More