

Method and device for controlling weight
A control method and pendant technology, applied in fishing, application, fishing reels, etc., can solve the problems of fishing line falling out and inability to control fine control of speed changes, etc., and achieve the effect of improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0141] The settlement test of the sinker is carried out according to the following method.
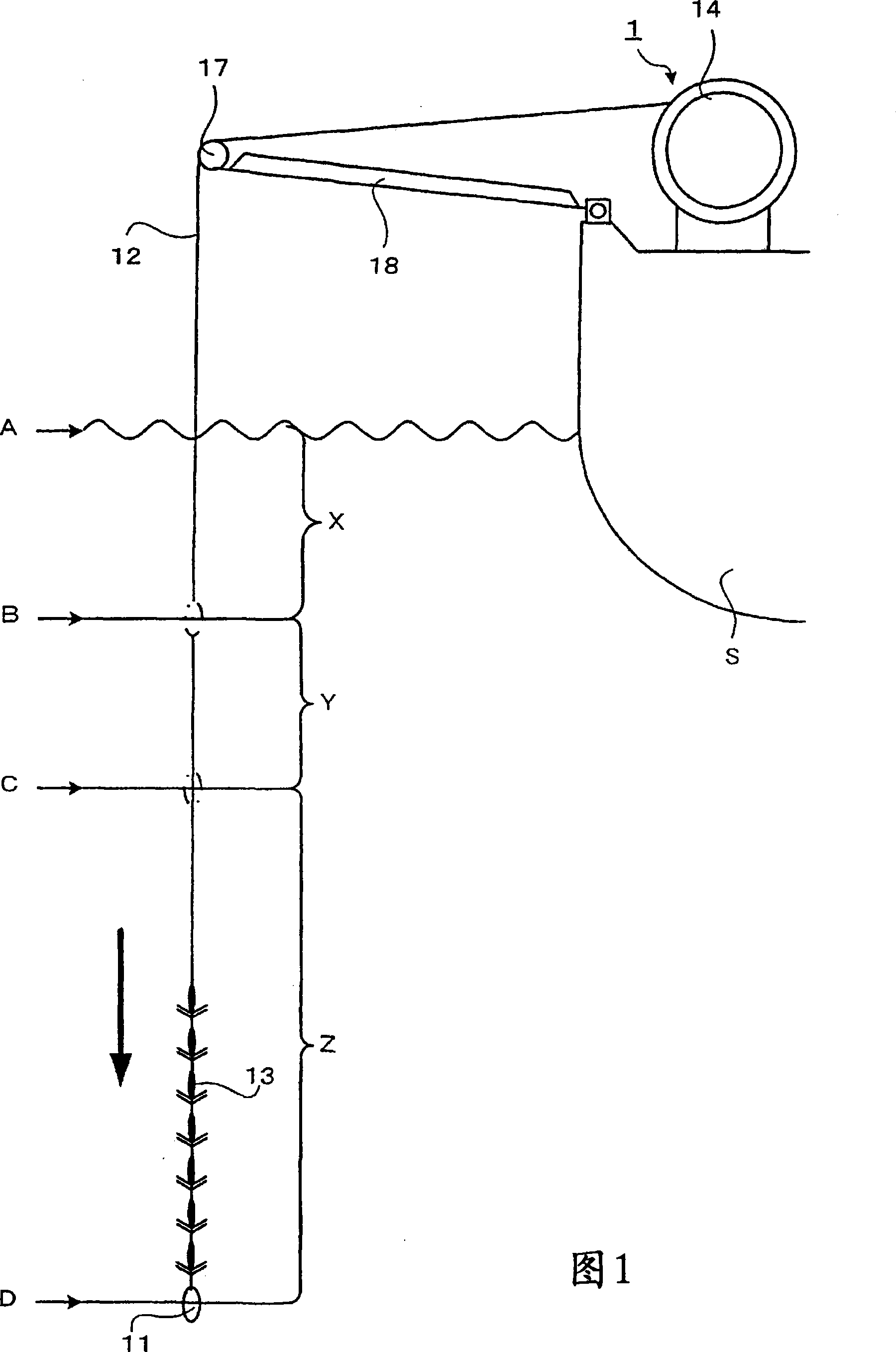
[0142] The pendant used is cast iron RDM (mass 1125g, volume 155.9cm 3 , Density 7.2g / cm 3 ). The sinker is installed at the front end of the fishing line. The connecting hook for the hook extends over a range of 40m at the tip of the fishing line.
[0143] The speed change of the pendant when it sinks by its own weight is as follows: Figure 9 As shown, the payout length of the fishing line between 0 and 15m is equivalent to the speed increase area X, and the speed of the sinker can reach up to 3.3m / s. Then, when the pay-out length of the fishing line is between 15 and 40m, the speed of the weight decreases from 3.3m / s to 2.4m / s. Finally, between 40 and 100m, it is equivalent to a certain speed zone Z where the speed of the weight converges to a roughly constant value, and the speed of the weight is basically stable at 2.4m / s.
[0144] According to the above results, the Figur...
Embodiment 2
[0147] As Embodiment 2, the weight is controlled according to a control method including speed-up processing. Pendant adopts the same as embodiment 1. After the sinker is thrown into the seawater, the rotational speed of the driving motor is increased, and it is linearly increased to 3.1m / s (=140rpm) at the water depth L0. Then keep 3.1m / s from water depth L0 to water depth L1. Then reduce the speed of the drive motor from 3.1m / s to 2.4m / s (=110rpm) from the water depth L1 to L2, and set the speed of the drive motor to 2.4m / s from the water depth L2 to the water depth L3 . In addition, the water depth L0 is set to 12m in the speed increase area, the water depth L1 is set to 25m after reaching the speed decrease area, and the water depth L2 is set to the hook installation length of 40m.
[0148] Figure 11 It shows the result of controlling the settlement of the sinker according to the above-mentioned control method. Figure 11The command speed given to the drive motor in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More