

Scene depth restoring and three dimension re-setting method for stereo visual system
A technology of scene depth and stereo vision, applied in the field of scene depth recovery and 3D reconstruction, can solve the problems of error, affect the reconstruction accuracy, rarely used, etc., and achieve the effect of high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
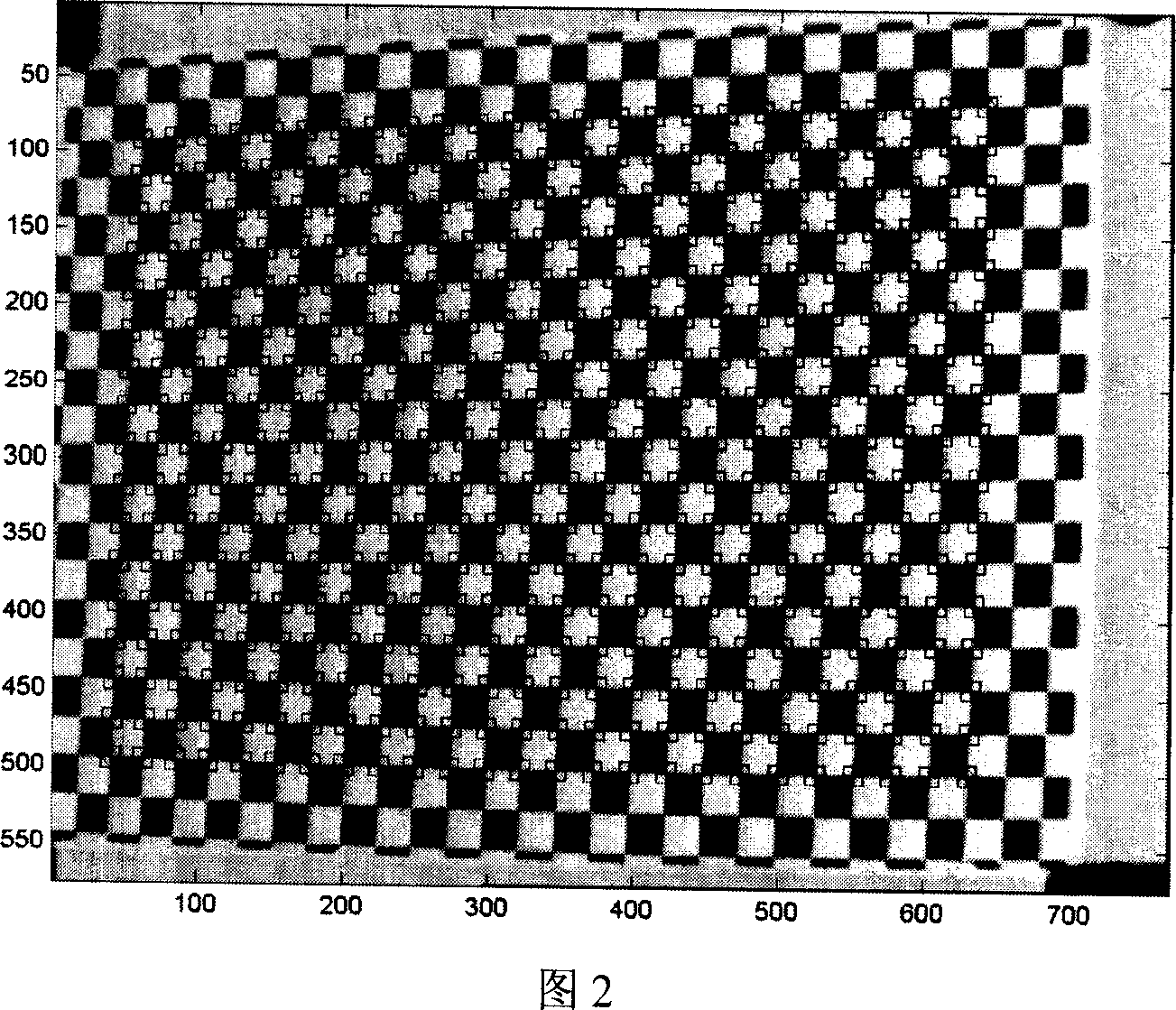
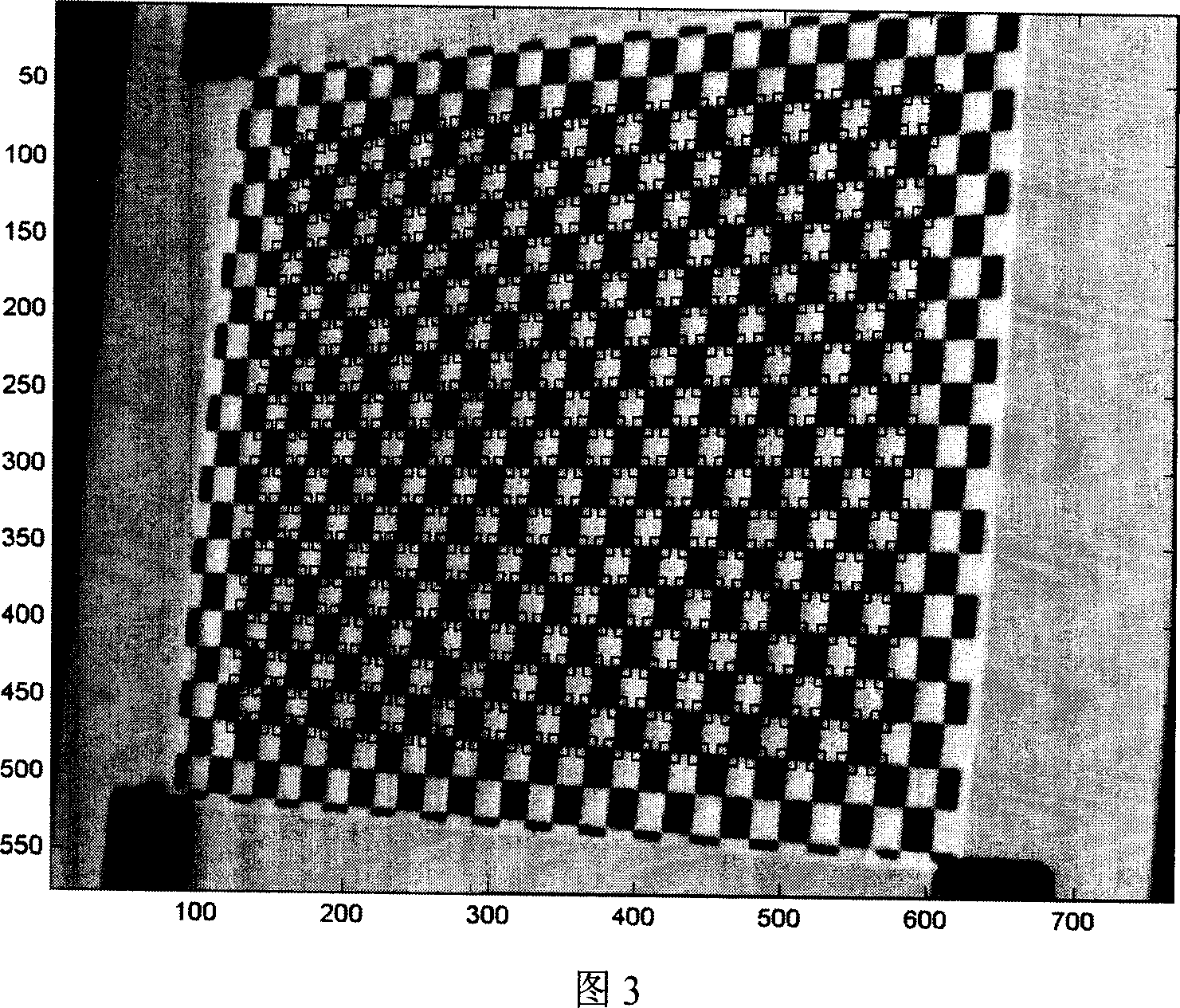
[0044] As shown in Figures 2 and 3, the left image and the right image obtained by shooting a plane grid with an arbitrary configuration stereo vision system. The internal parameters of the camera calibrated with Camera Calibration Toolbox for Matlab are
[0045] A l = 2960.0607 0 325.3013 0 2942.9866 278.0017 0 0 1 ; A r = 2984.8065 0 391.6716 0 ...
Embodiment 2
[0051] Figure 5 shows a target object to be reconstructed. There are three infrared LEDs on the object, and the two cameras in the stereo vision system described in Embodiment 1 are used to capture the light-emitting images of the three infrared LEDs, and the obtained left and right images are shown in Figures 6 and 7 respectively. The positions of the centers of the three infrared LEDs are reconstructed by the method of the present invention, and the coordinates of the tip TIP of the target object are obtained through the three centers of the LEDs. The reconstruction results are shown in FIG. 8 .
[0052] Adopt the method of the present invention
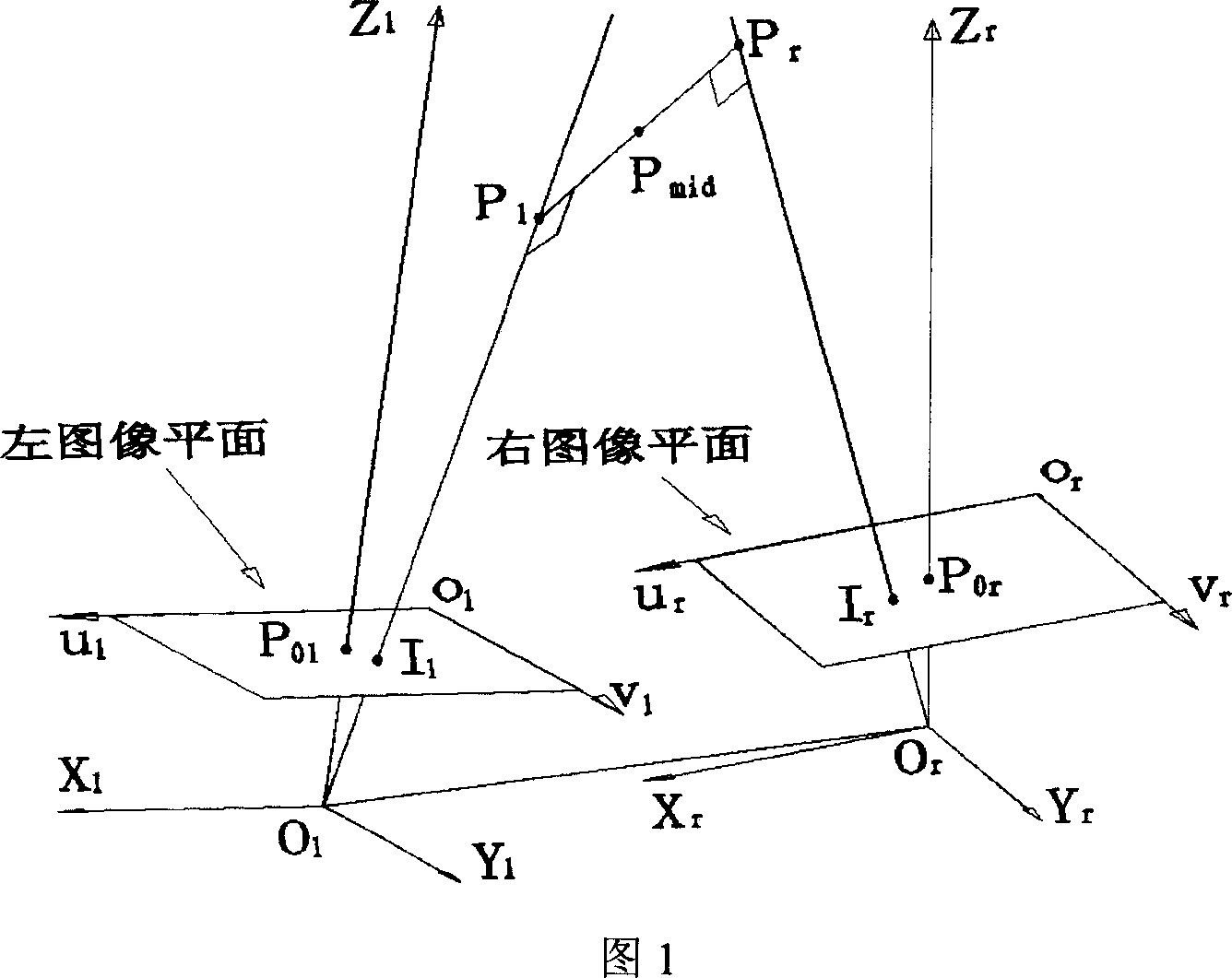
[0053] It can be seen from Examples 1 and 2 that the result of reconstruction using the present invention is more accurate than the method using image correction. Because the calculation formula that the present invention adopts in step 5 is by asking projection line O l I l point P on l with projection line O r I ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More