

Mixed submarine navigation device
An underwater vehicle, a hybrid technology, applied in the directions of underwater ships, underwater operation equipment, ship construction, etc., can solve short, generally several kilometers to several hundred kilometers, the maximum is not more than 1000 kilometers, can not be realized, Track and positioning control difficulties, etc., to achieve the effect of accurate and fast tracking and monitoring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
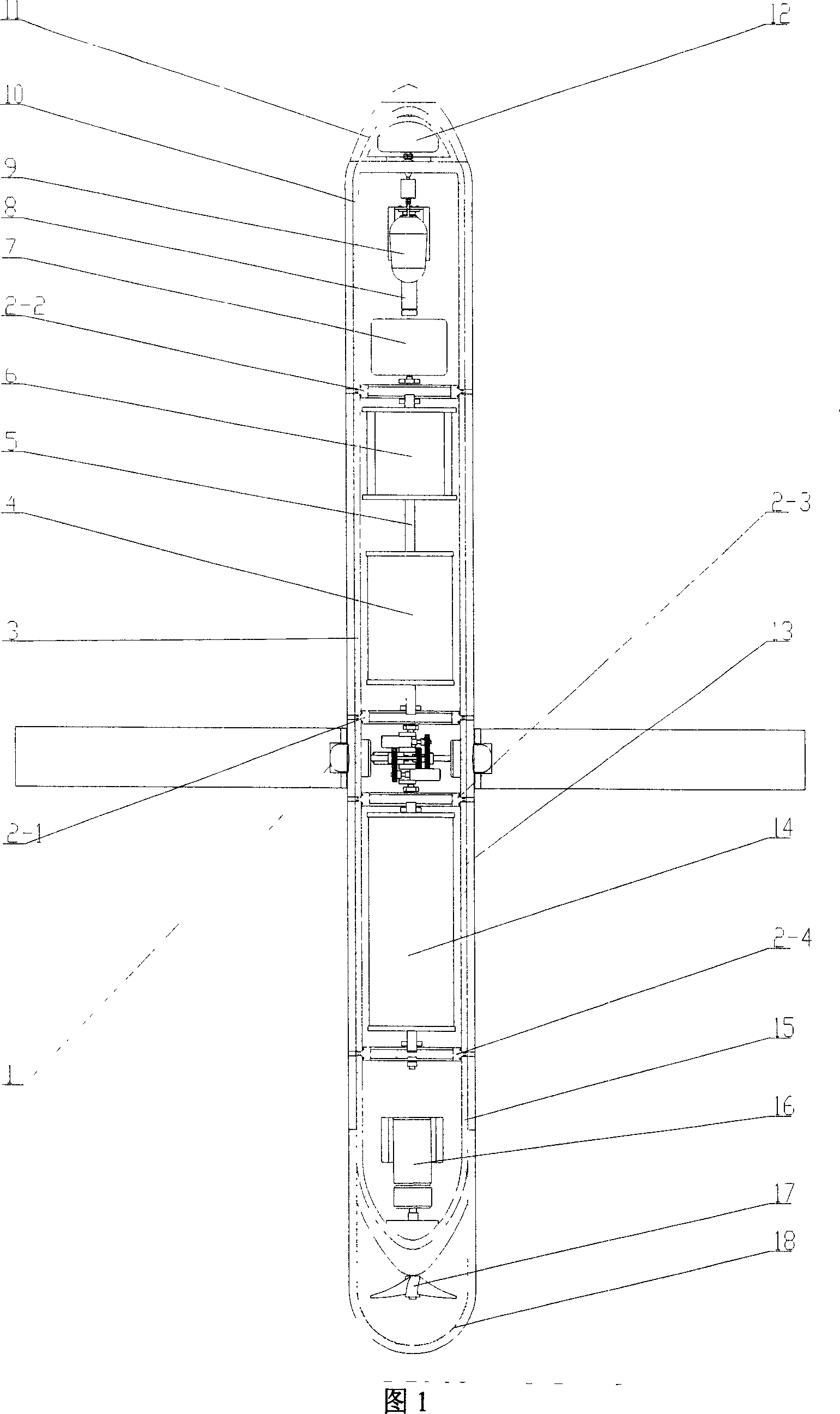
[0020] The structural principles of the present invention will be further described below through embodiments and with reference to the accompanying drawings. The aircraft consists of a head compartment 11, a buoyancy drive and control compartment 10, an attitude control compartment 3, a wing compartment 1, a battery compartment 13 and a tail compartment 15, which are connected by screws through the body connecting part 2, and O-rings are used to realize Sealing, two symmetrical wings 19-1, 19-2 are arranged outside the wing compartment 1. When the aircraft is in the glider mode, it is driven by a buoyancy drive system, and the specific implementation is as follows: the buoyancy drive system is composed of an outer skin bag 12, an inner skin bag 9 and a hydraulic system 8, and the outer skin bag is installed in the head compartment 11 and passed through the hydraulic system. 8 links to each other with inner skin bag 9, and head storehouse 11 communicates with outside waters. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More