

Laparoscopic ultrasound robotic surgical system
a robotic surgical system and laser technology, applied in the field of robotic surgical systems, can solve the problems of inability to manually palpate hidden or solid organs, the difficulty of manipulating the ultrasound probe, and the considerable expertise of the ablation probe, so as to promote surgeon efficiency and facilitate us
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
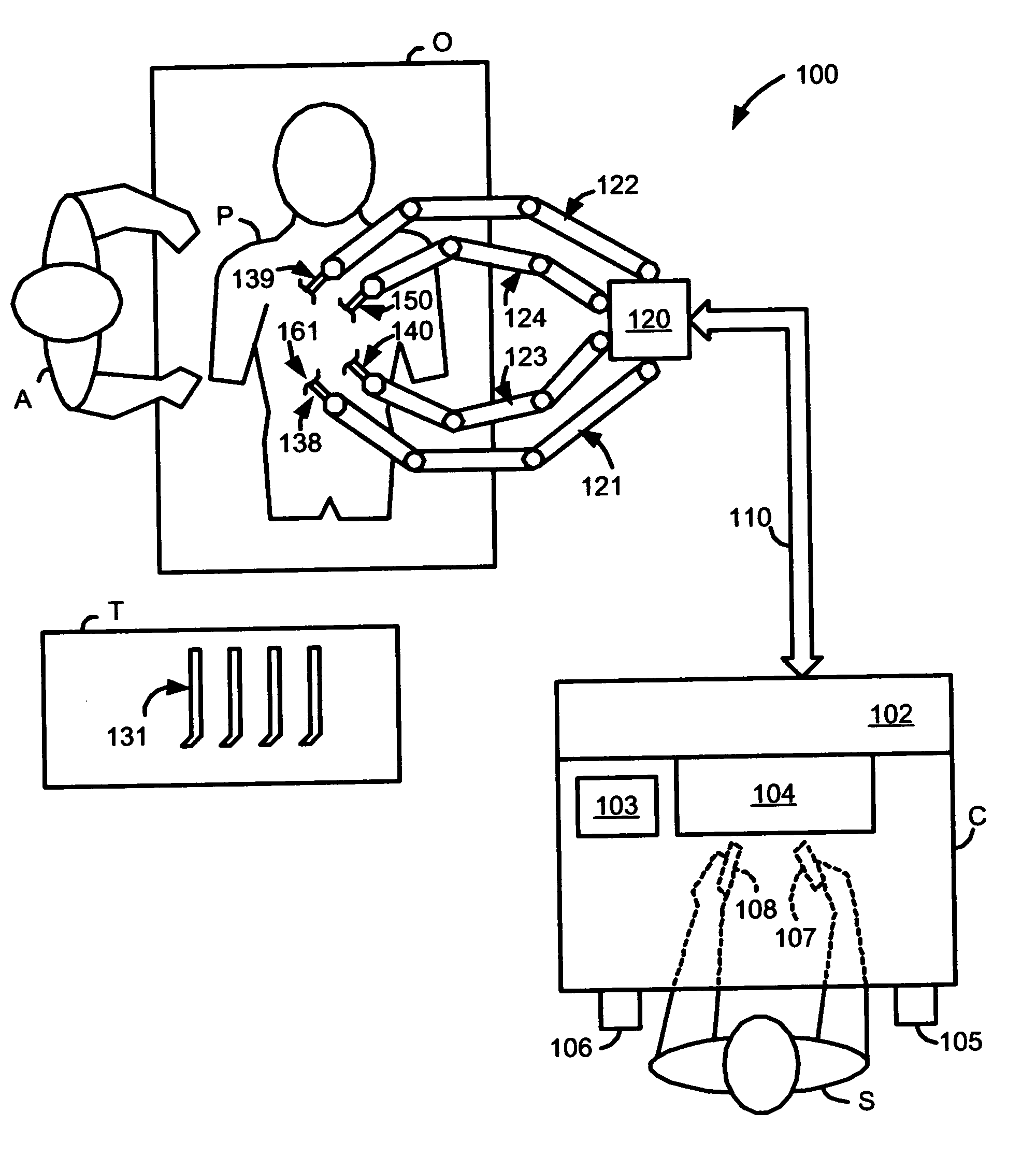
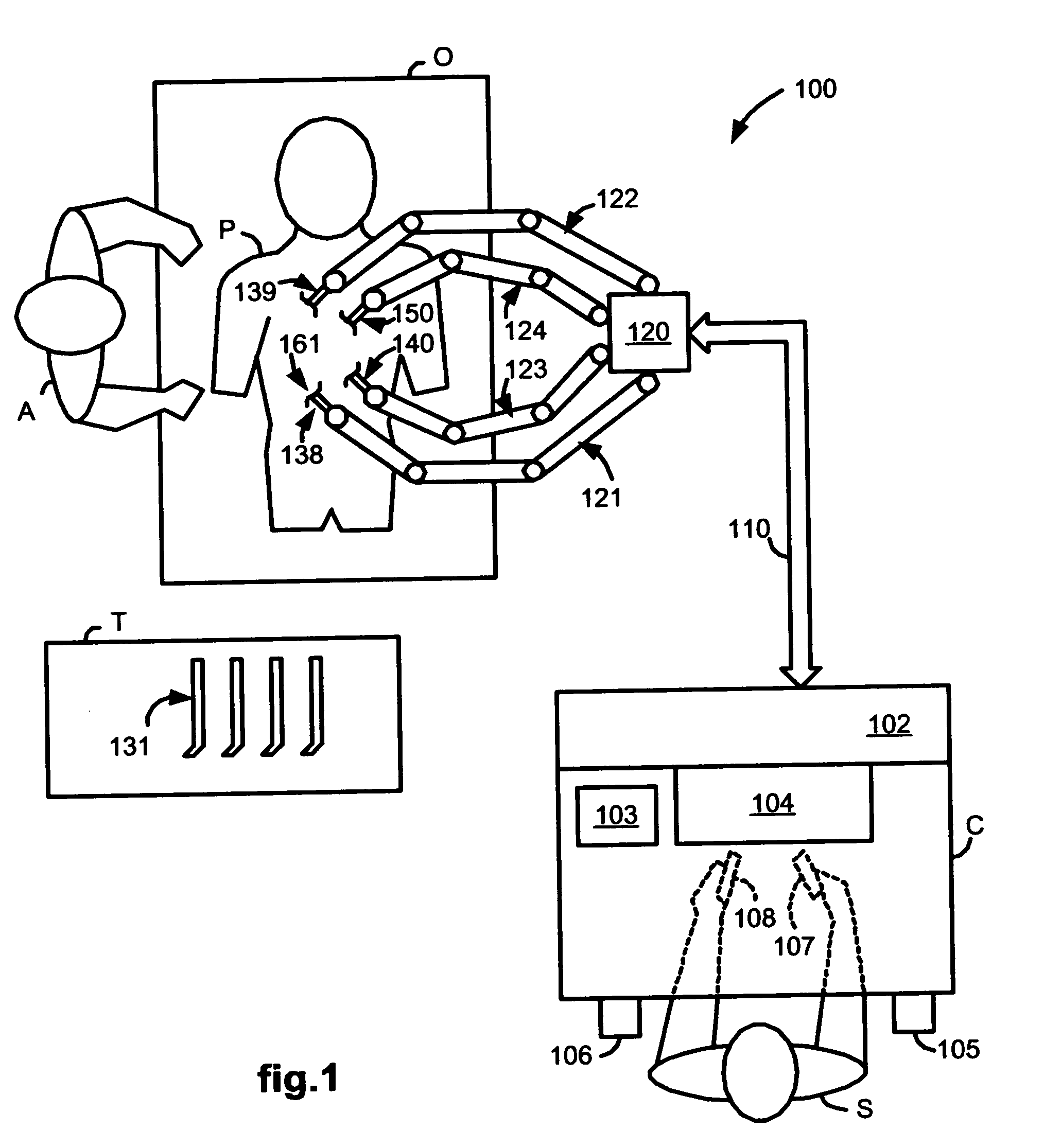
[0038]FIG. 1 illustrates, as an example, a top view of an operating room employing a robotic surgical system. The robotic surgical system in this case is a Laparascopic Ultrasound Robotic Surgical System 100 including a Console (“C”) utilized by a Surgeon (“S”) while performing a minimally invasive diagnostic or surgical procedure with assistance from one or more Assistants (“A”) on a Patient (“P”) who is reclining on an Operating table (“O”).
[0039] The Console includes a Master Display 104 (also referred to herein as a “Display Screen”) for displaying one or more images of a surgical site within the Patient as well as perhaps other information to the Surgeon. Also included are Master Input Devices 107 and 108 (also referred to herein as “Master Manipulators”), one or more Foot Pedals 105 and 106, a Microphone 103 for receiving voice commands from the Surgeon, and a Processor 102. The Master Input Devices 107 and 108 may include any one or more of a variety of input devices such as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More