[0006] The method and
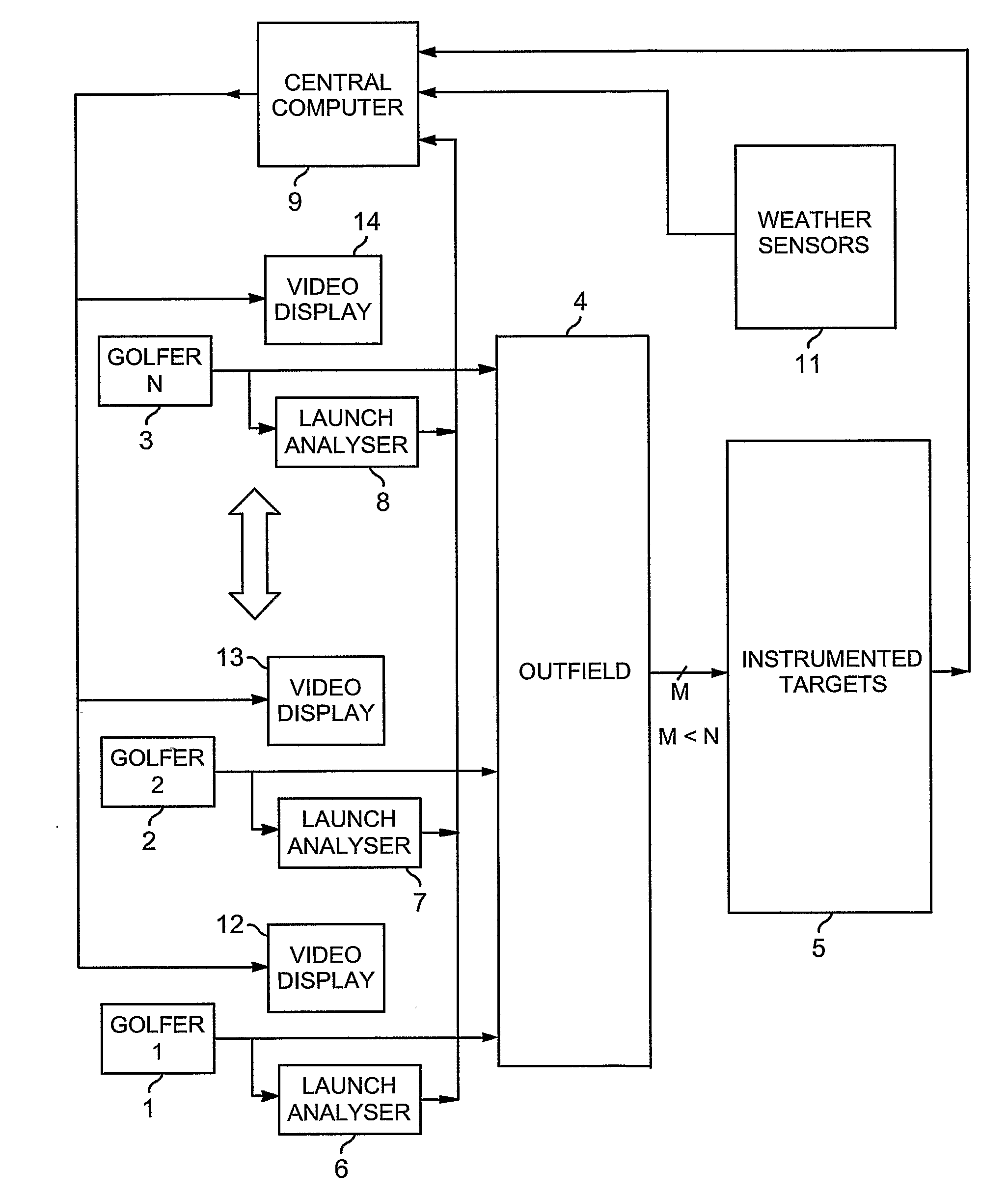
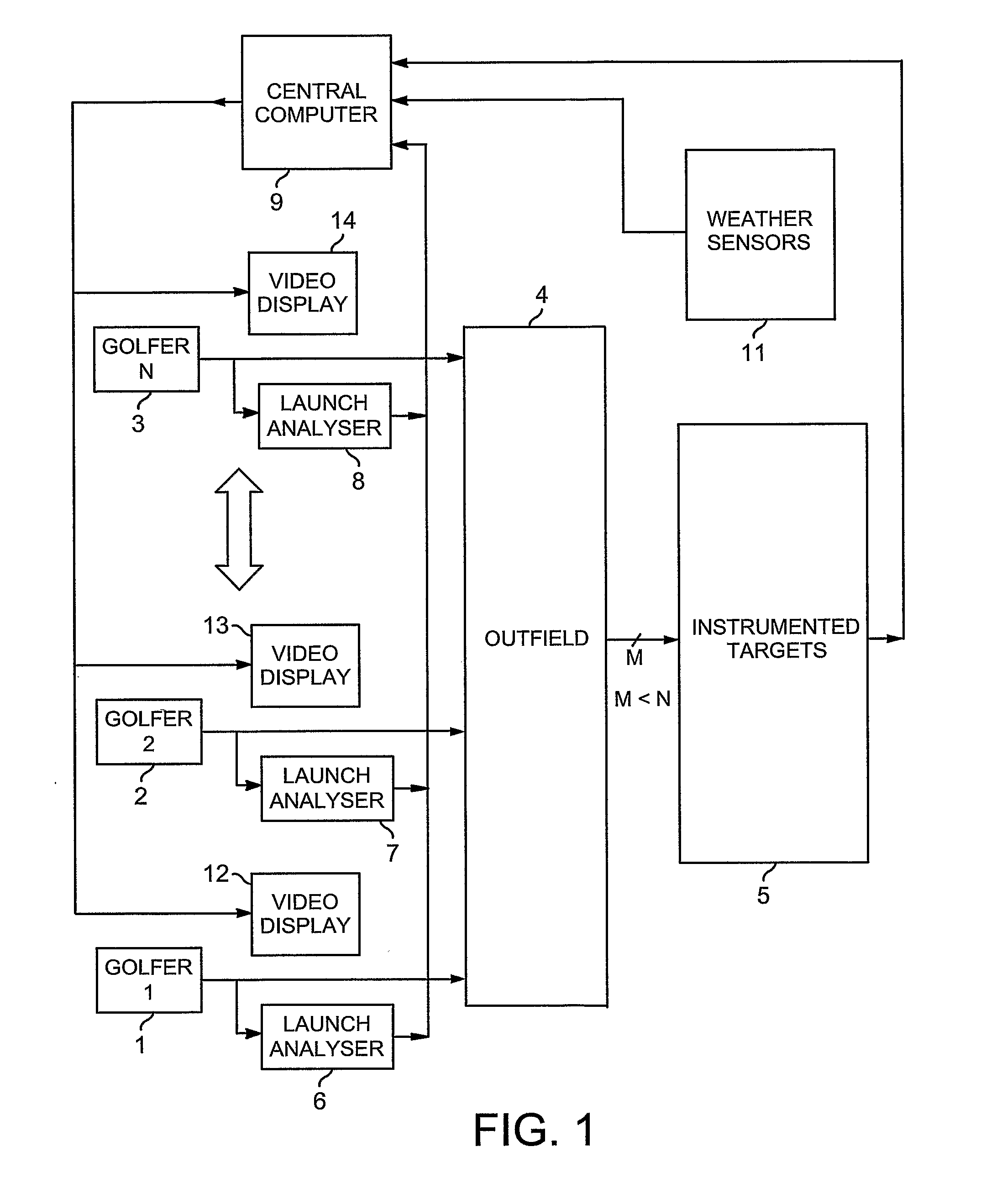
system of the invention is especially applicable to providing representations of the outcome of successive strikes of a
golf ball, for example in the context of a golf range. In this respect, measurements of the launch velocity and spin vectors of a ball can be used to predict its ensuing flight-carry and -duration, its landing speed, landing backspin, angle of descent and subsequent bounce and roll. However, the accuracy of such prediction is very prone to errors arising from inaccuracies in the
flight model, the bounce and roll model and the launch measurements and also variations in atmospheric conditions (e.g.
wind speed, rain,
temperature and pressure) and also in the rebound and friction properties of the landing
terrain. The method and
system of the present invention enable a significant improvement in prediction accuracy to be achieved by sensing the actual outcomes realised in relation to some shots and from the way in which these differ from the predicted outcomes computed for those same shots, correct the
computation process adaptively to reduce error.
[0007] The “end-of-flight” parameters may be predicted and measured, namely, the carry-length, the direction and the
flight duration. One possible means of achieving the measurement of actual carry distance and deviation and the
flight duration is disclosed in WO-A-9201494 which describes the use of geophones distributed around a reception area to sense the
impact of the ball as it lands. Signals corresponding to the
time of arrival of the
impact vibration at
proximate geophones are recorded and, by analysing the time differences in these signals at different geophones, the position and time of
impact can be accurately measured.
[0013] Another way of creating a detection plane is to arrange that the TXRX axis is parallel to the length axis of the slit-aperture. Provided the TXRX separation is small compared to the length of the slit-aperture, the fields of view for the light emitting means and light-sensing means are nearly identical. The detection plane thus formed comprises the common
field of view. An
advantage of this type of detection plane compared with that previously described, is that more light is emitted into the detection plane and more light is reflected back from the detection plane because the entire
field of view is used. However, the width of the detection plane increases with range as it spreads out into a wedge shaped volume. This can be corrected using a
cylindrical lens, so that the detection plane is again of uniform thickness (equal to the width of the slit-aperture) or nearly so. This method of forming the detection plane improves its sensitivity and operating range.
[0016] Means may be provided to enhance the detection of a retro-reflector in the presence of unwanted reflections from other parts of the moving article by placing a
first light polarizing filter in front of the
light emitter and a second light
polarizing filter in front of the co-acting light sensor. Light reflected from the retro-reflector has its plane of polarization rotated 90 degrees (or theoretically so). The two filters are oriented so that the planes of polarization are at 90 degrees to one another (or at optimum cross orientation), so only the polarized target-reflected light is allowed to pass through the said second
polarizing filter and into the light sensor. When the polarized emitted light strikes other (non-retro-reflective) surfaces of the object being detected or internal surfaces in the measurement apparatus, its plane of polarization is not rotated, and the returned beam is blocked from entering the sensor. A second co-acting light sensor may be provided on the obverse side of the
light emitter with a polarized filter aligned with the plane of polarisation of the emitted light. This is insensitive to reflected light from retro-
reflective surfaces but sensitive to other
reflective surfaces, and provides two signals, for example, one responsive to retro-reflective dots on the surface of a
golf ball and the second responsive to reflections from the ball surface alone.
[0017] Various types of polarizing filters may be used such as Rochon, Brewster or dichroic polarizers. One type of dichroic
polarizer that is advantageously useful at
infrared wavelengths is the wire-grid
polarizer. Wire-grid polarizers are very expensive to manufacture compared to the much more common sheet polarizers (based on modified
polyvinyl alcohol iodine) but, in the present context, the dimensions of the filters are exceptionally small so it is economic to use wire-grids. Since both the emitter and sensor devices in a TXRX pair share a common focusing lens and / or slit-aperture, the filters are preferably fabricated on or very close to the active areas of these devices. The active areas are very small (e.g. 0.1 to 1.0 square millimeters) so the polarizing filters are also very small. Judicious design of the wire-grids and associated conductors can also help to reduce
radio frequency interference in the sensor signals generated by the relatively high power emitter drive signals. Anticipating future developments in
light emitter and sensor devices, the emitter and / or sensor may transmivrespond in one plane of polarization without need of additional filters.



 Login to View More
Login to View More  Login to View More
Login to View More