

Driving Support System And Vehicle
a technology of supporting system and support system, which is applied in the field of driving support system and vehicle, can solve the problem of insufficient visibility support and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first example
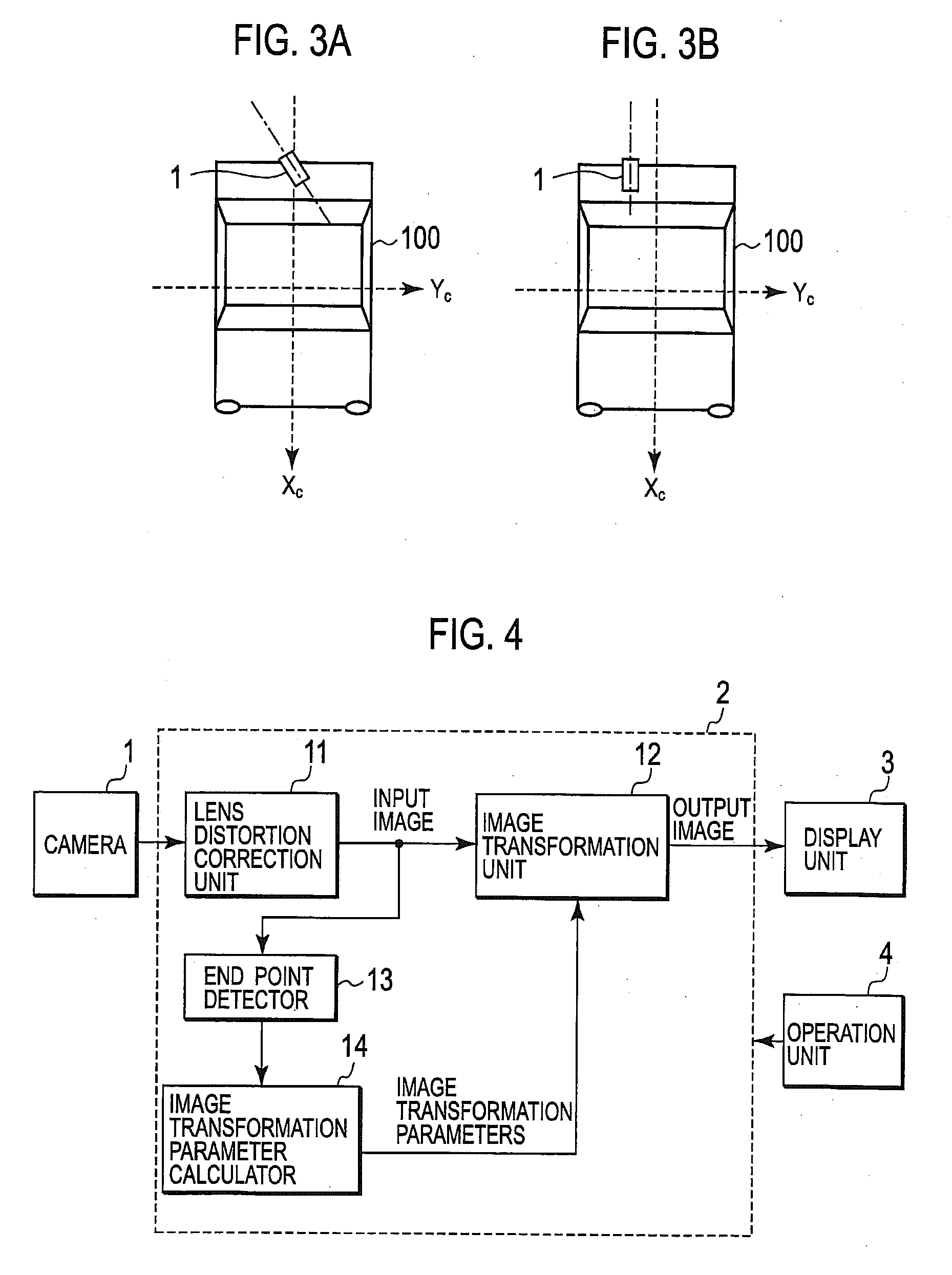
[0051]A first example of the present invention will be described. FIG. 4 is a configuration block diagram of a visibility support system according to the first example. The image processor 2 of FIG. 4 includes components respectively denoted by reference numerals 11 to 14.
[0052]A lens distortion correction unit 11 performs lens distortion correction for the image obtained by capturing the scene with the camera 1 and then outputs the image after the lens distortion correction to an image transformation unit 12 and an end point detector 13. The image outputted from the lens distortion correction unit 11 after the lens distortion correction is hereinafter termed as an “input image.” It should be noted that the lens distortion correction unit 11 can be omitted in a case where a camera having no lens distortion or only a few ignorable amounts of lens distortion is used as the camera 1. In this case, the image obtained by capturing the scene with the camera 1 may be directly transmitted t...
second example
[0096]Next, a second example of the present invention will be described. FIG. 15 is a configuration block diagram of a visibility support system according to the second example. The visibility support system of FIG. 15 includes the camera 1, an image processor 2a, the display unit 3 and the operation unit 4. The image processor 2a includes components denoted by reference numerals 11 to 15, respectively. Specifically, except that an image transformation verification unit 15 is added in the configuration of the visibility support system according to the second example, the configuration is the same as that of the visibility support system according to the first example. Except for this point, both of the visibility support systems are the same. Accordingly, a description will be hereinafter given of only functions of the image transform verification unit 15. The matters described in the first example also apply to the second example unless there is a discrepancy.
[0097]FIG. 16 is a flo...
third example
[0106]Next, a third example of the present invention will be described. FIG. 18 is a configuration block diagram of a visibility support system according to the third example. The visibility support system of FIG. 18 includes the camera 1, an image processor 2b, the display unit 3 and the operation unit 4. The image processor 2b includes components respectively denoted by reference numerals 11, 12, 14, 15, 21 and 22.
[0107]The functions of the lens distortion correction unit 11, the image transformation unit 12, the image transformation parameter calculator 14 and the image transformation verification unit 15 are the same as those described in the first or the second example.
[0108]A procedure of deriving image transformation parameters according to this example will be described with reference to FIG. 19. FIG. 19 is a flowchart showing this procedure of deriving image transformation parameters. First, in step S30, the editing environment of a periphery of the vehicle 100 is set in a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More