

Method and a system for determining the geometry and/or the localization of an object
a technology of geometry and localization, applied in the field of method and system for determining the geometry and/or the localization of an object, can solve the problems of large matrix of shifted impulse response, high computational cost, and inapplicability of proposed algorithm in practice, and achieve the effect of multiple microphones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067]The present invention will be now described in more detail in connection with its embodiment for determining the geometry of a room. However the present invention finds applicability of connection with many other fields, as will be discussed. Moreover the two-dimensional case will be described first for the sake of simplicity and illustrations. The three dimensional case then follows easily.
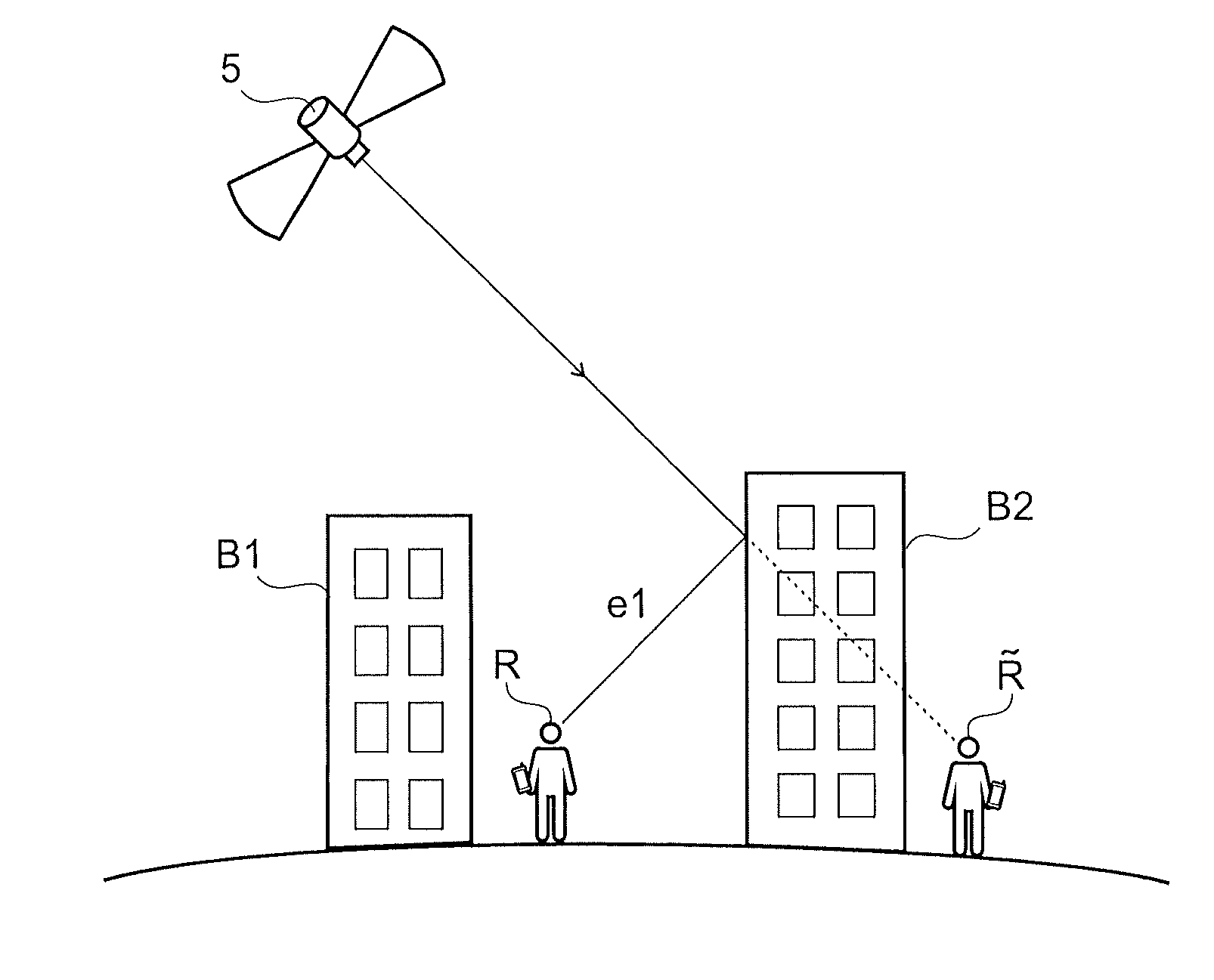
[0068]The method according to the invention uses the image source model. The idea in the image source model is that if there is a sound source on one side of the wall, then the sound field on the same side can be represented as a superposition of the original sound field and the one generated by a mirror image of the source with respect to the wall.
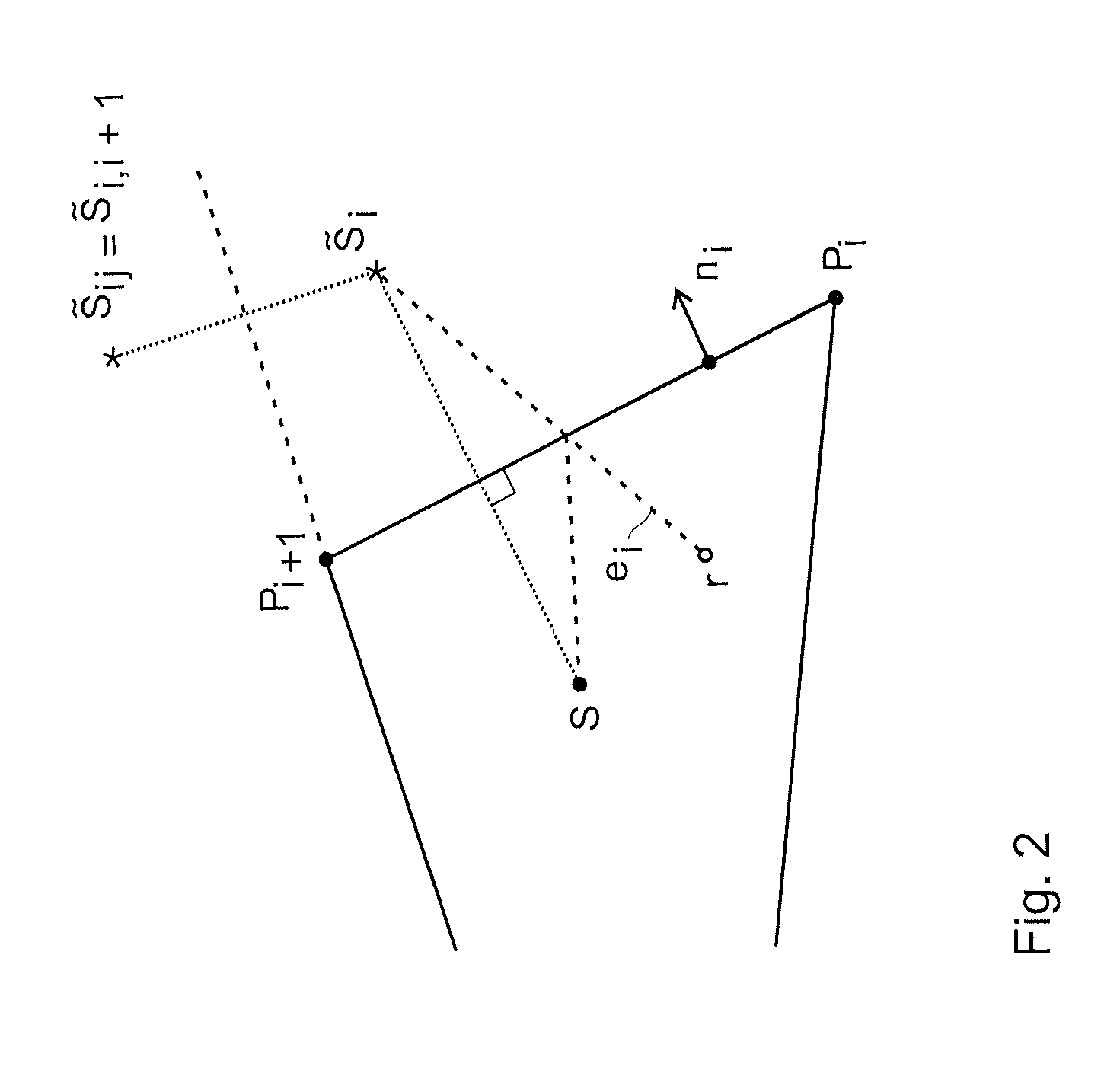
[0069]FIG. 2 illustrates the setup and the image source model. For our purposes, a room is either a convex planar K-polygon or a K-faced convex polyhedron. With the ith side of the room we associate an outward pointing unit normal ni, and define ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More