

Assisted takeoff
a technology of assisted takeoff and launching gear, which is applied in the direction of instruments, electric controllers, launching/towing gear, etc., to achieve the effect of increasing the overall propulsion of the movable obj
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
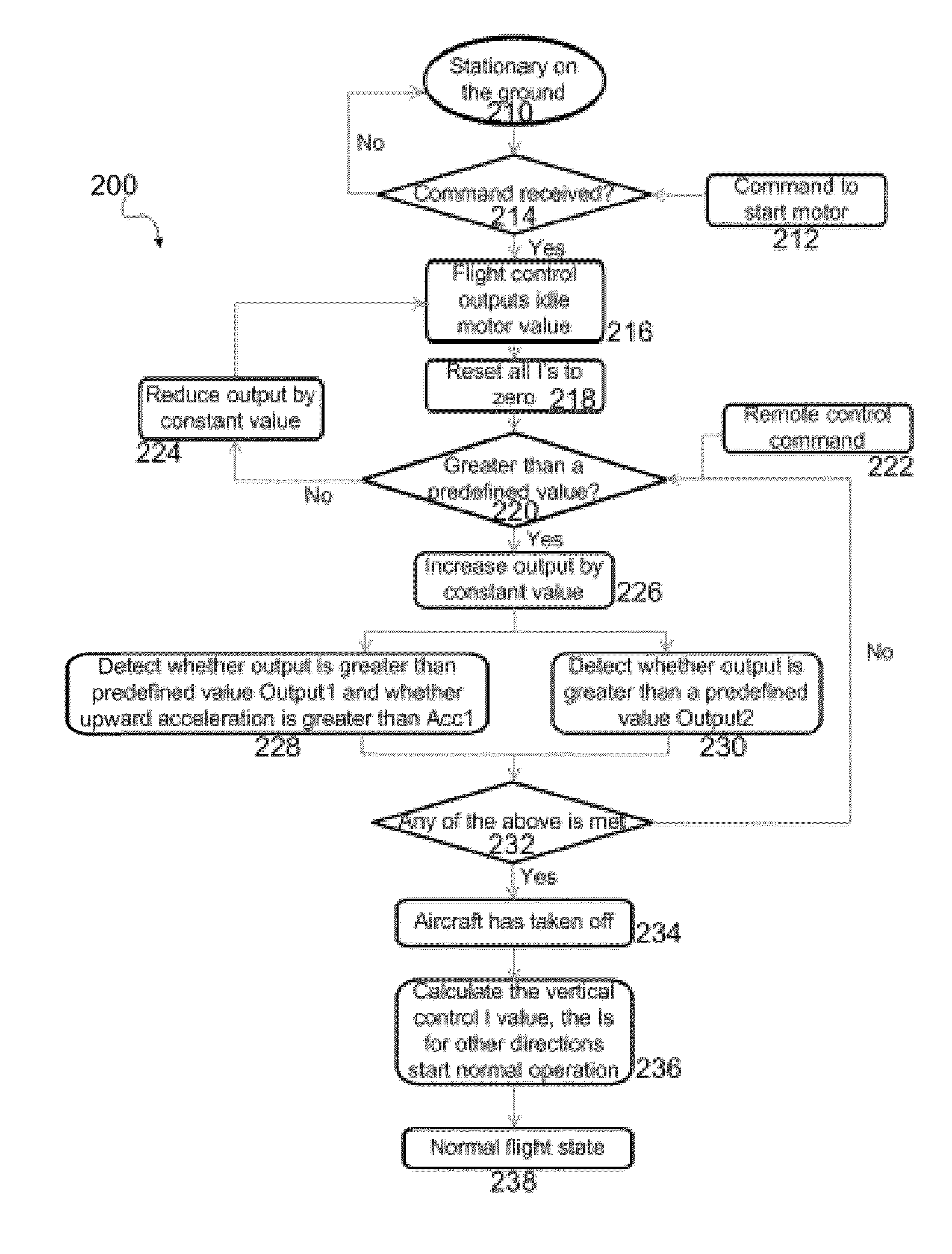
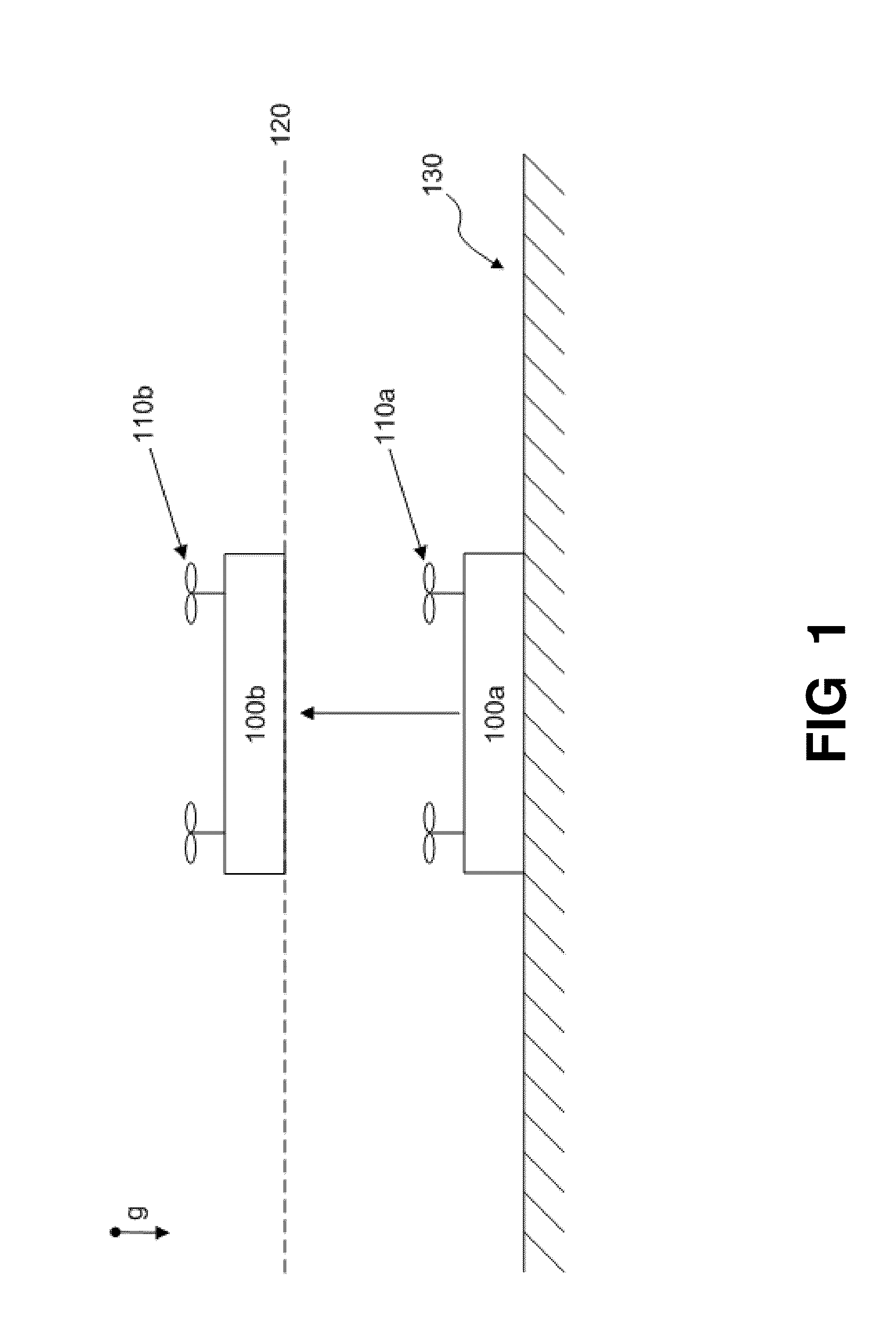
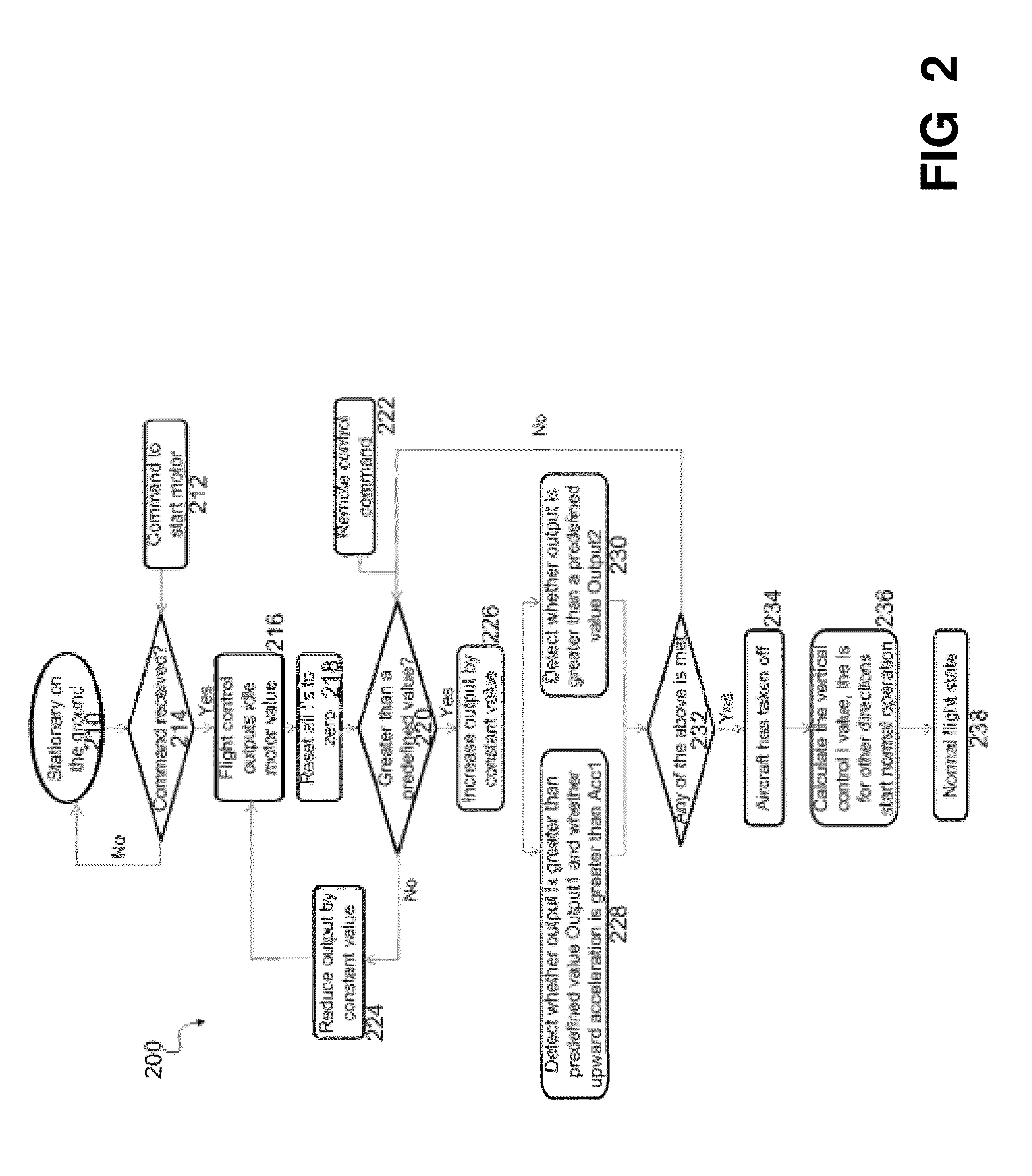
[0041]The systems, devices, and methods of the present invention provide assisted takeoff for an aerial vehicle from a surface, which enables improved control for a user. The aerial vehicle may be an unmanned aerial vehicle (UAV), or any other type of movable object. Oftentimes, a feedback control is used during flight of an aerial vehicle. During normal flight operations, a proportional-integral-derivative (PID) flight control system is often used. However, during takeoff, memory effects of integration combined with ground forces may cause the meaning of the integration expression to go wrong. This can cause instability during takeoff and may require complex maneuvers that many novice users may not be familiar or comfortable with. This can lead to crashing of the UAV during takeoff.
[0042]An assisted takeoff system, method, and device may be provided which may reduce this instability during takeoff and permit novice users to easily control the aerial vehicle during takeoff. While th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More