Passive infra-red pedestrian detection and avoidance system
a technology of infra-red pedestrian detection and avoidance system, which is applied in the field of autonomous vehicle operation, can solve the problems of high false indication rate, failure of full autonomous vehicle to respond to, or react to, its surroundings, and public reluctance to put full faith in true autonomous operation of such vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
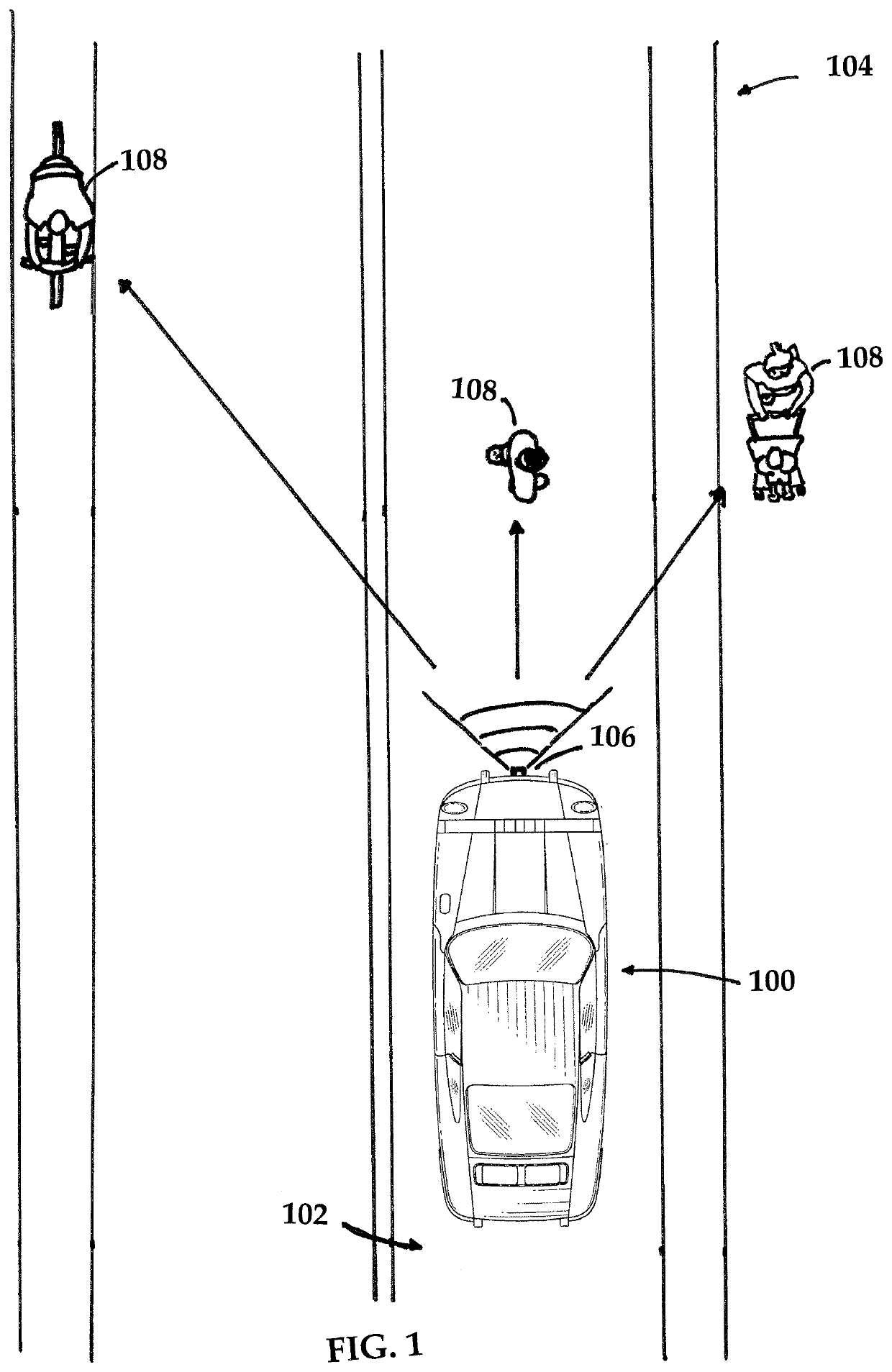
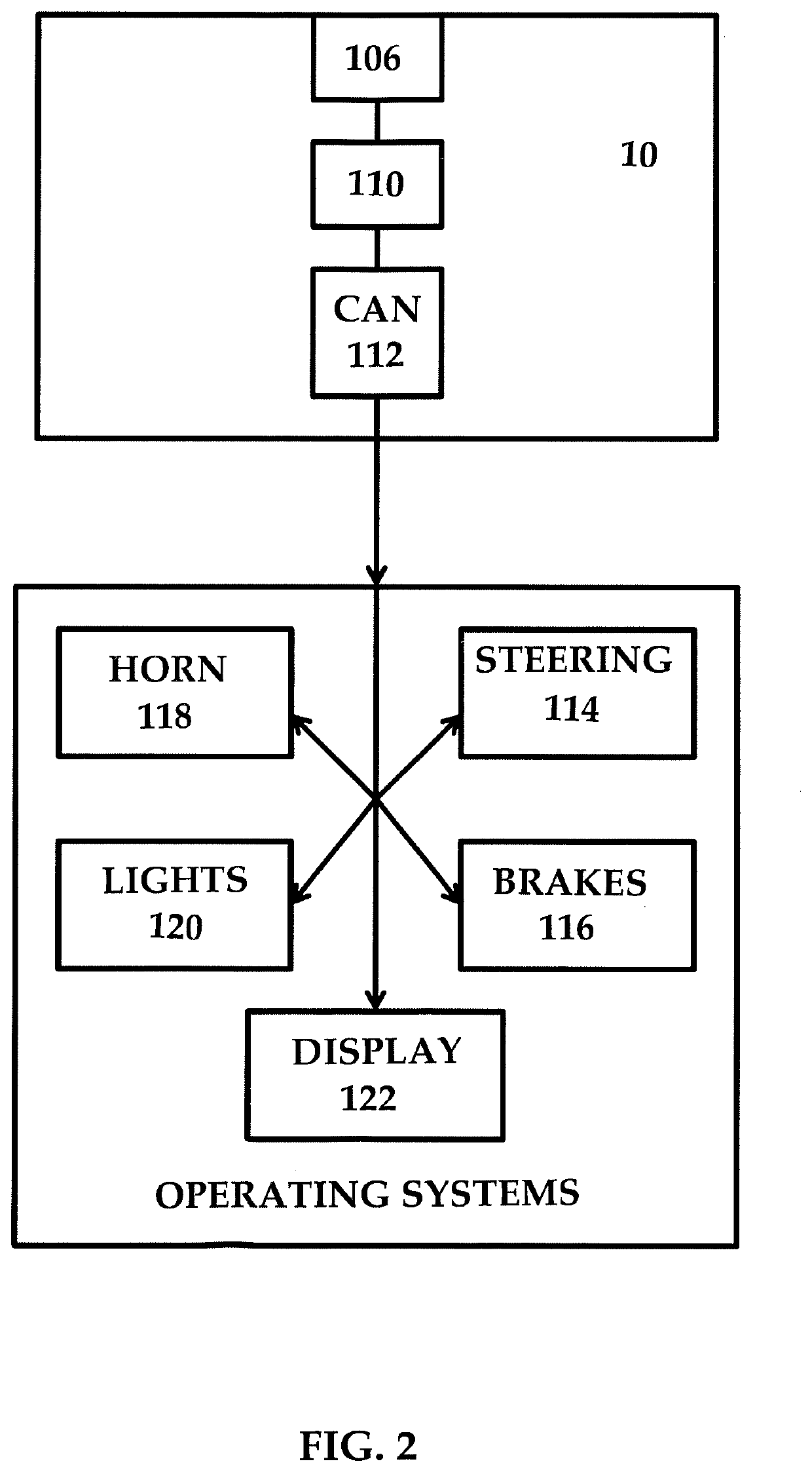
[0025]Referring to FIGS. 1-2, a first operational mode of a passive infra-red pedestrian avoidance system in accordance with the present invention is illustrated. As illustrated in FIG. 1, a vehicle 100 generally travels within a travel lane 102 on a roadway 104. The system, generally designated by reference numeral 10, comprises at least one forward-looking passive IR image sensor or sensor array, generally designated as reference numeral 106, mounted on the vehicle 100 and directed outwardly in front of the vehicle 100, as the vehicle 100 moves, so that the IR sensor(s) 106 can detect any stationary or moving object(s) 108 containing a human thermal profile in the vehicle's travel lane 102, or in the process of heading towards the vehicle's predicted pathway.
[0026]In preferred embodiments of the present invention, as generally illustrated in FIG. 1, a single, forward-looking IR sensor 106 is mounted on the vehicle 100, preferably on the front of the vehicle 100, and more preferabl...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap