

Two-freedom plane parallel high-speed high-accuracy robot
A degree of freedom, high-precision technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as unfavorable system speed, restricting system speed and acceleration, and reducing mechanism positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
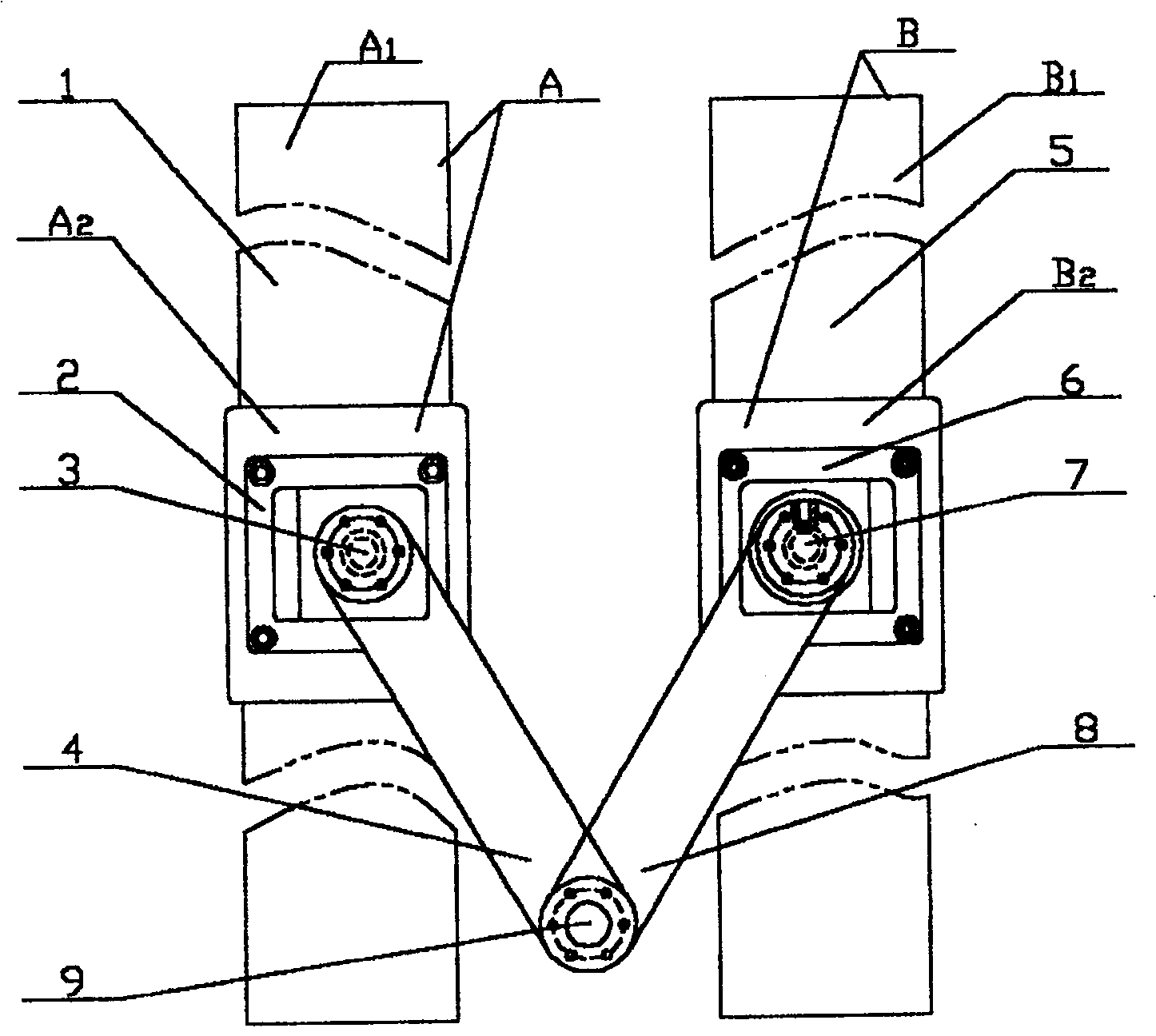
[0005] Specific implementation mode one: see figure 1 , the present embodiment is made up of left linear guide rail 1, right linear guide rail 5, left mobile platform 2, right mobile platform 6, driving device, left linkage 4, right linkage 8. The driving device is a left linear motor A and a right linear motor B arranged in parallel, and the stator guide rail A of the two linear motors 1 and B 1 That is, the left linear guide rail 1 and the right linear guide rail 5, the left moving platform 2 and the right moving platform 6 are respectively fixedly connected to the mover A of the two linear motors 2 and B 2 On; one end of the left link 4 and the right link 8 is connected with the left moving platform 2 and the right moving platform 6 through the first turning pair 3 and the second turning pair 7 respectively, and the other end of the left link 4 and the right link 8 One end is connected to each other through the end rotating pair 9.
specific Embodiment approach 2
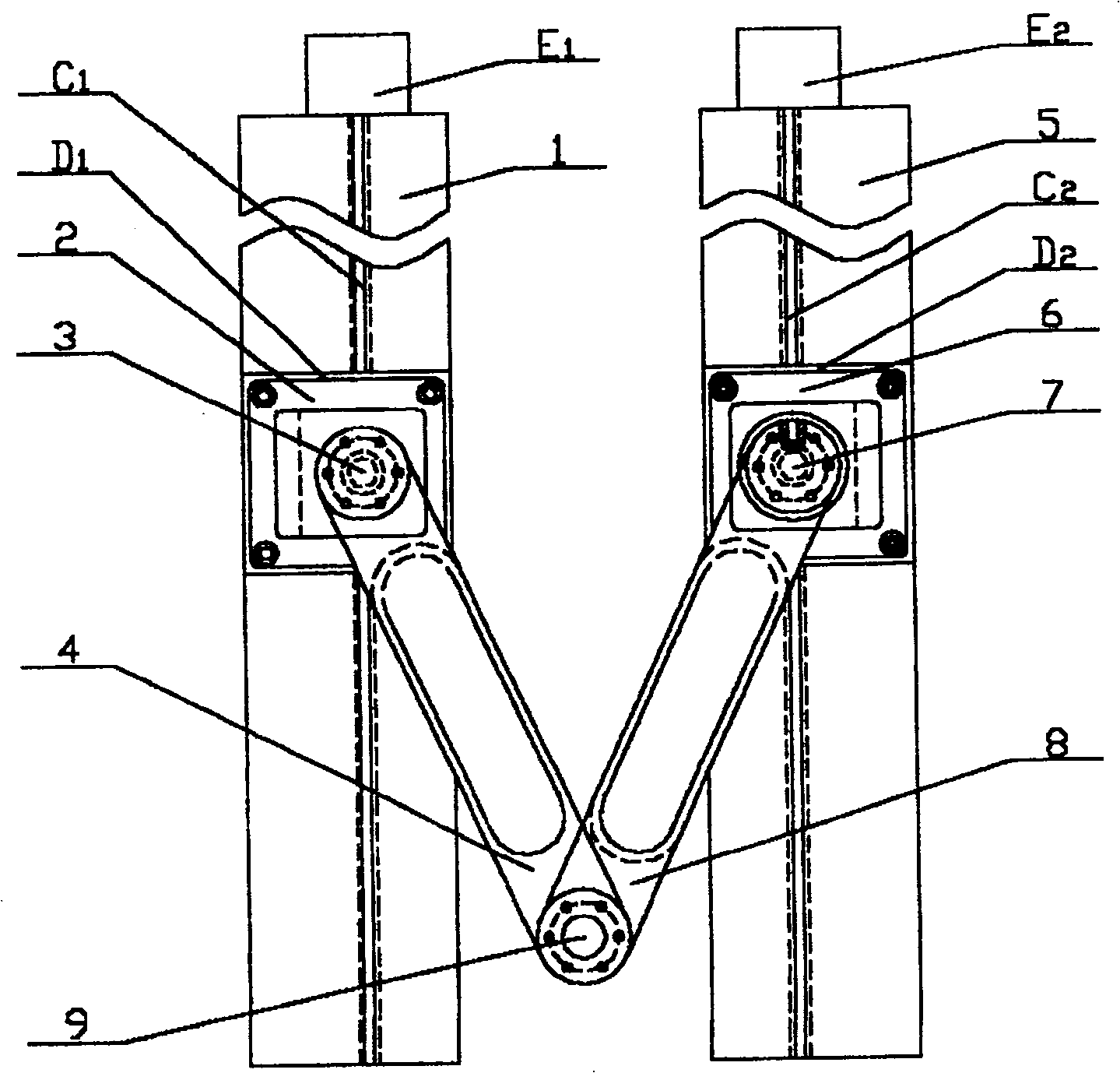
[0006] Specific implementation mode two: refer to figure 2 The difference between this embodiment and the first embodiment is that the driving device consists of a left lead screw C arranged on the left linear guide rail 1 and the right linear guide rail 5 1 and right lead screw C 2 , the left slider D matched with the left and right screw respectively 1 and right slider D 2 , the left motor E that drives the left and right lead screws to rotate 1 and right motor E 2 composition, the left mobile platform 2 and the right mobile platform 6 are respectively installed on the left slider D 1 and right slider D 2 superior. In this embodiment, the motor drives the lead screw to rotate, and the left and right platforms generate linear motion through the slider, and the linear motion of the platform is converted into a two-dimensional plane motion at the end of the link. Other compositions and connections are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More