

A camera marking method based on double 1-dimension drone
A camera calibration and camera coordinate system technology, which is applied in the field of computer vision, can solve the problems of low calibration accuracy, cumbersome operation, and the need for auxiliary equipment, and achieve the effects of improving calibration accuracy, expanding the calibration range, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The basic idea of the present invention is: take two one-dimensional targets as calibration objects, place two one-dimensional targets arbitrarily in the field of view of the camera, take target images from different angles, and only need to extract three or three More than one feature point is used to calibrate the internal and external parameters of the camera.
[0029] The present invention will be described in further detail below in conjunction with specific embodiments and accompanying drawings.
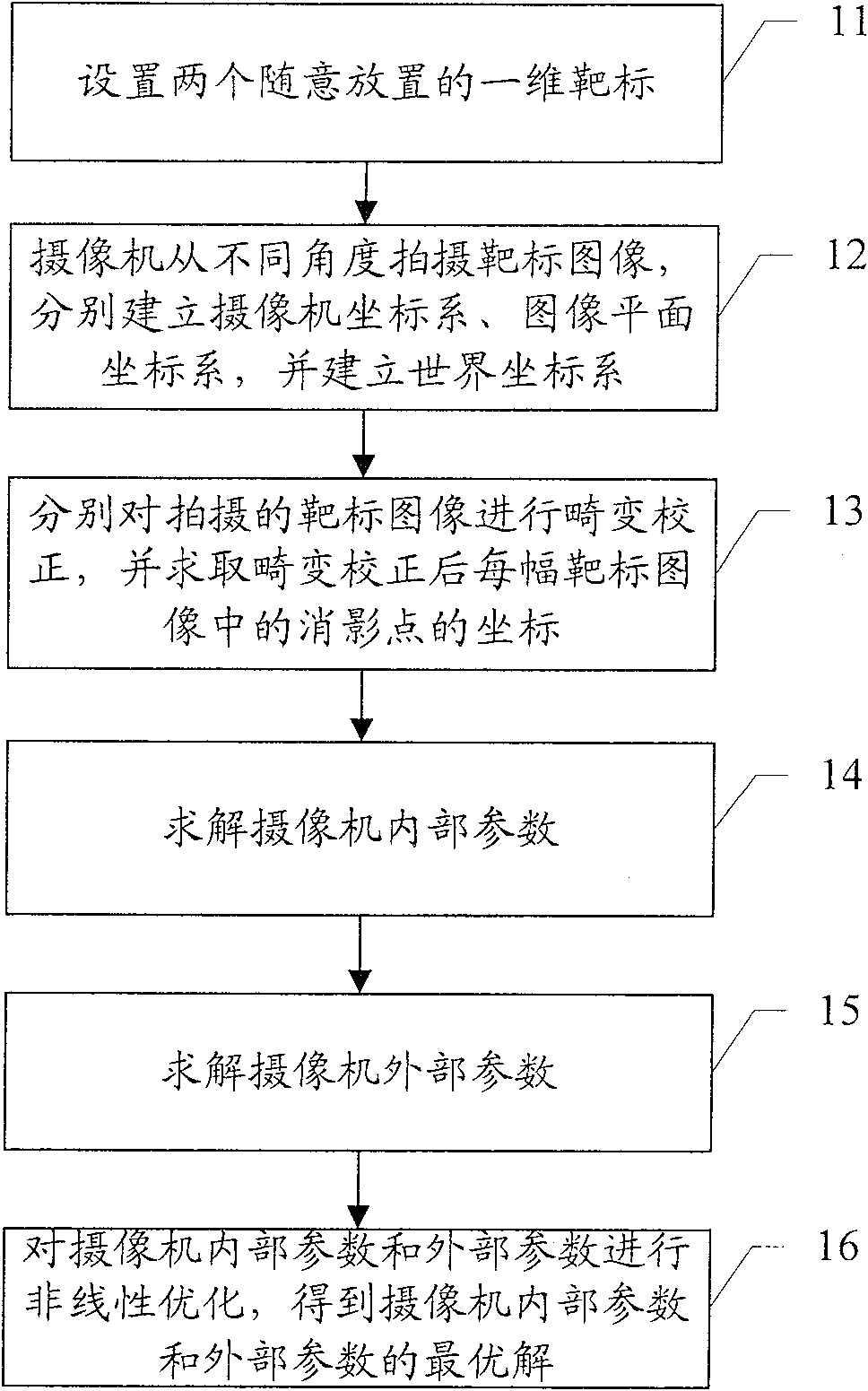
[0030] figure 1 It is a flow chart of the camera calibration method based on the double one-dimensional target of the present invention, such as figure 1 As shown, the camera calibration method based on the double one-dimensional target of the present invention comprises the following steps:
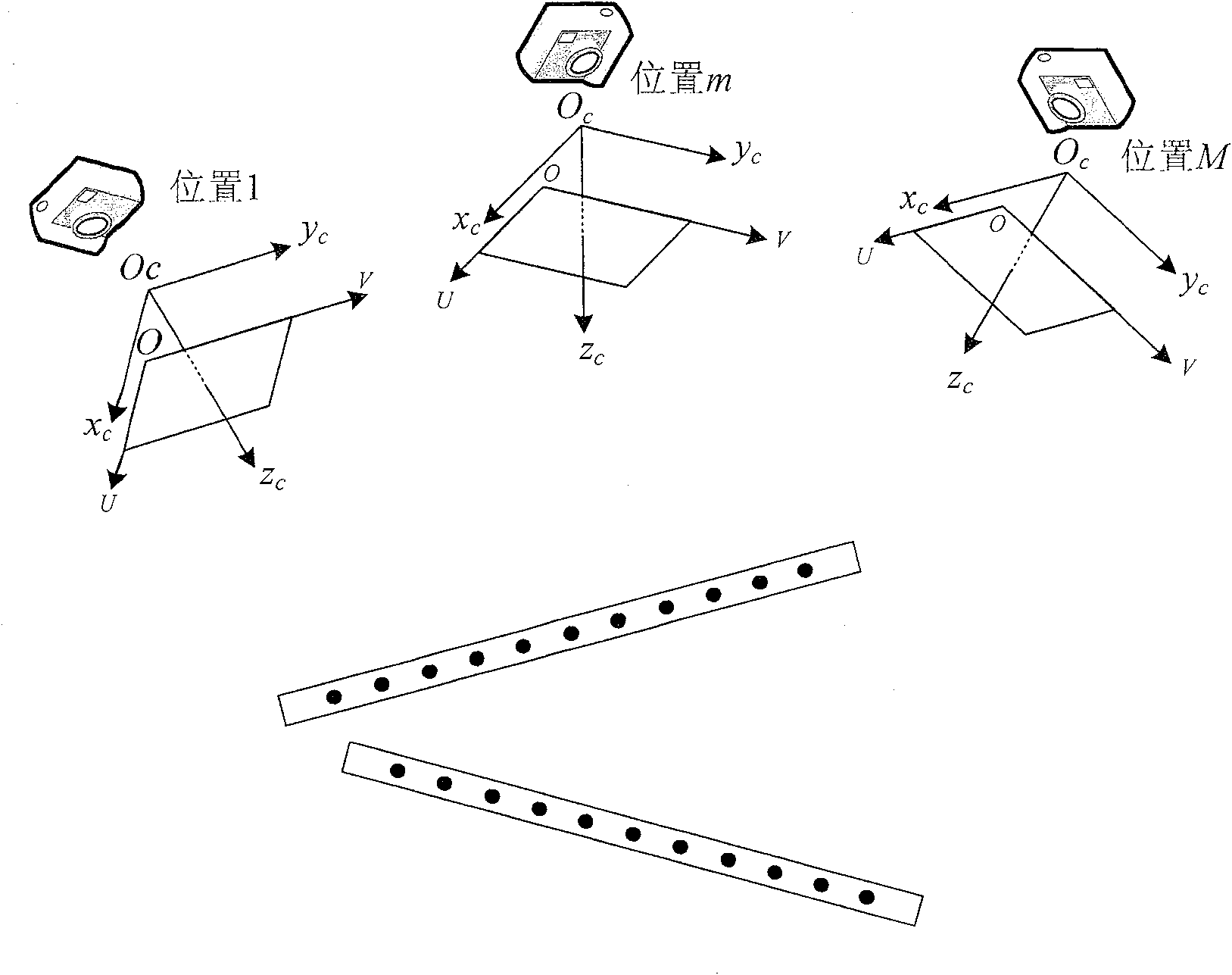
[0031] Step 11: Set up two randomly placed one-dimensional targets.
[0032] Here, the one-dimensional target is a linear target whose marker points are collinear, figure 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More