

Method for moving robot simultanously positioning and map structuring at unknown environment
A technology for mobile robots and unknown environments, applied in the field of simultaneous positioning and map construction of mobile robots in unknown environments, can solve problems such as uncertainty of robot positioning without considering the problem of robot positioning, and achieve the effect of less storage space and computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] An implementation example of simultaneous localization and map construction of a robot in an unknown environment according to the present invention will be described in detail below with reference to the accompanying drawings. In this implementation example, the robot can move independently, and the distance measuring sensor equipped is a laser range finder, or a sonar range finder, or a stereo vision system, or a combination thereof, and the dead reckoning sensor equipped is an odometer .
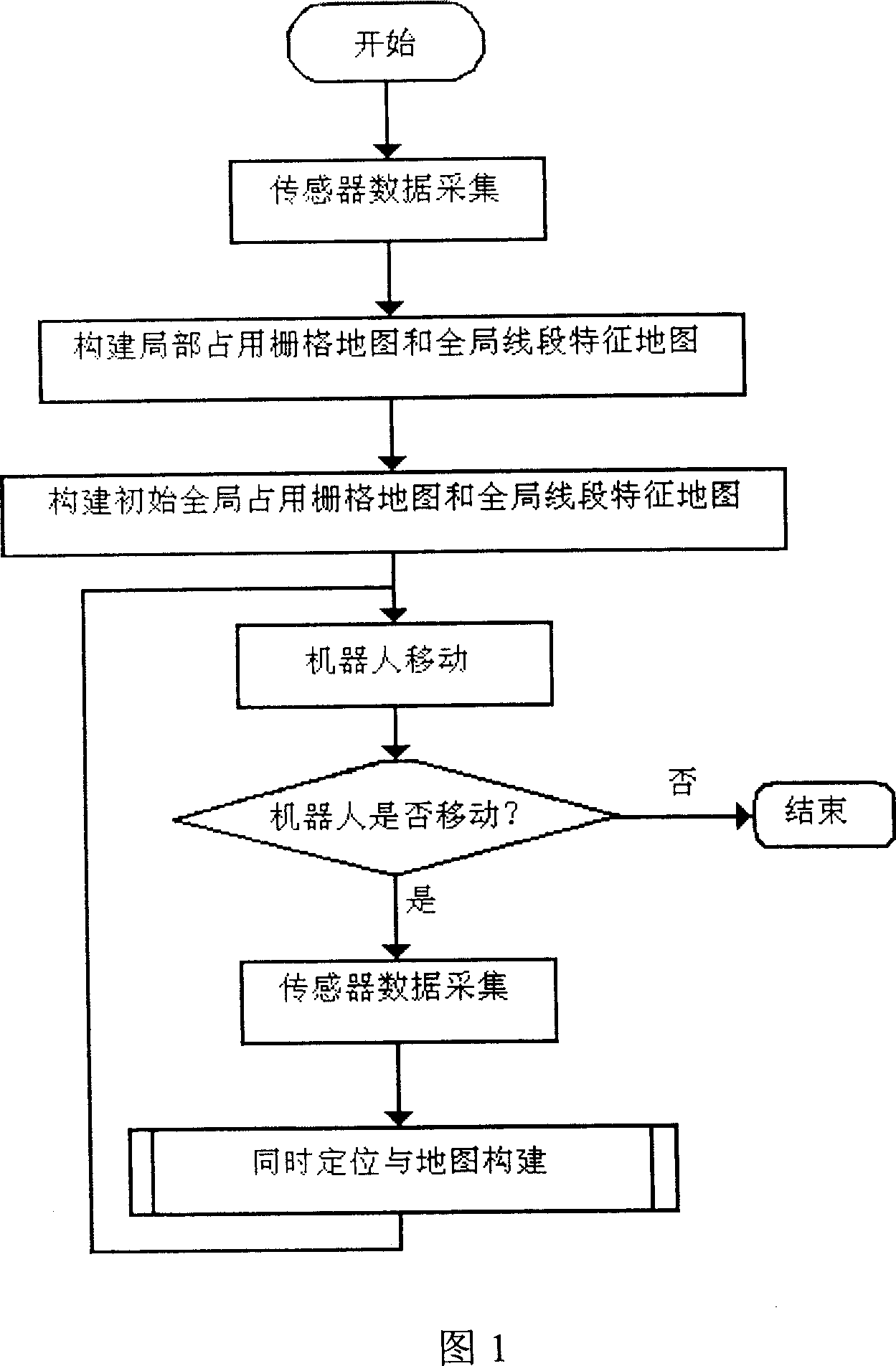
[0064] Fig. 1 is the software flowchart of implementing the method of the present invention. The mobile robot starts from any position in the unknown environment and in any direction. First, collect sensor data (step S1), construct a local occupancy grid map and a local line segment feature map (step S2), and convert the local occupancy grid map data and local line segment feature map data into global map coordinates through coordinate system conversion system, thereby obtaining a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More