Six-axis force sensor assembled mechanical hand guise and force control method thereof
A technology of six-dimensional force sensor and control method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low assembly precision of multi-degree-of-freedom, and achieve the effect of high rigidity, simple adjustment mechanism and high adjustment precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
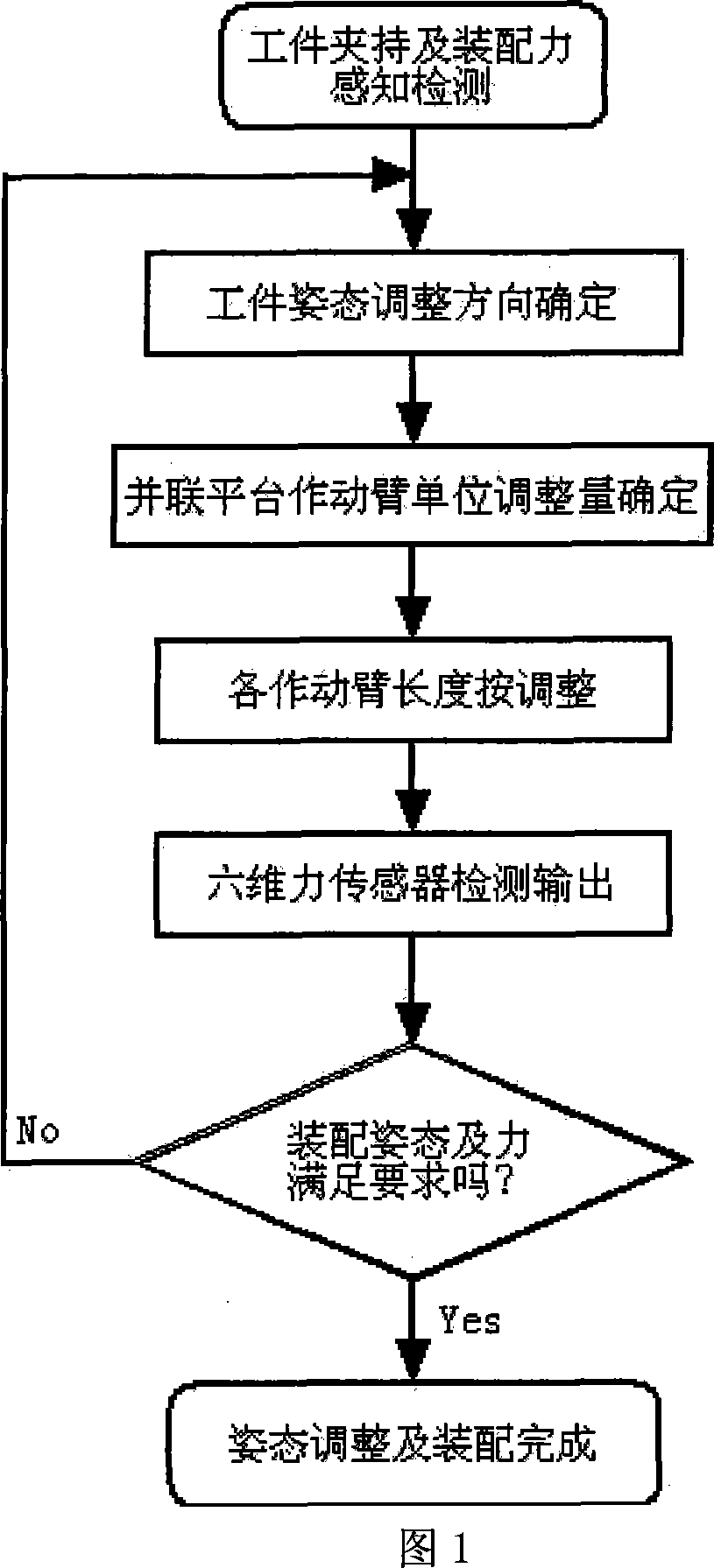
[0021] As shown in Figure 1, this embodiment detects workpiece clamping and assembly force perception → determines the direction of workpiece posture adjustment → determines the unit adjustment amount of the boom on the parallel platform → adjusts the length of each boom → six-dimensional force sensor detection output → assembly Attitude and assembly force detection → Attitude and assembly force meet the requirements, attitude adjustment and assembly are completed / attitude and assembly force do not meet the requirements, readjust to achieve precise control of workpiece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com