

Minimally invasive celiac surgery robot
A surgical robot and abdominal cavity technology, applied in the field of robotics, can solve the problems of not being able to achieve the degree of automation and intelligence, low precision in performing complex actions, and less freedom of minimally invasive surgical robots, so as to reduce the use of drugs and reduce bleeding. Good volume and movement coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to these embodiments.
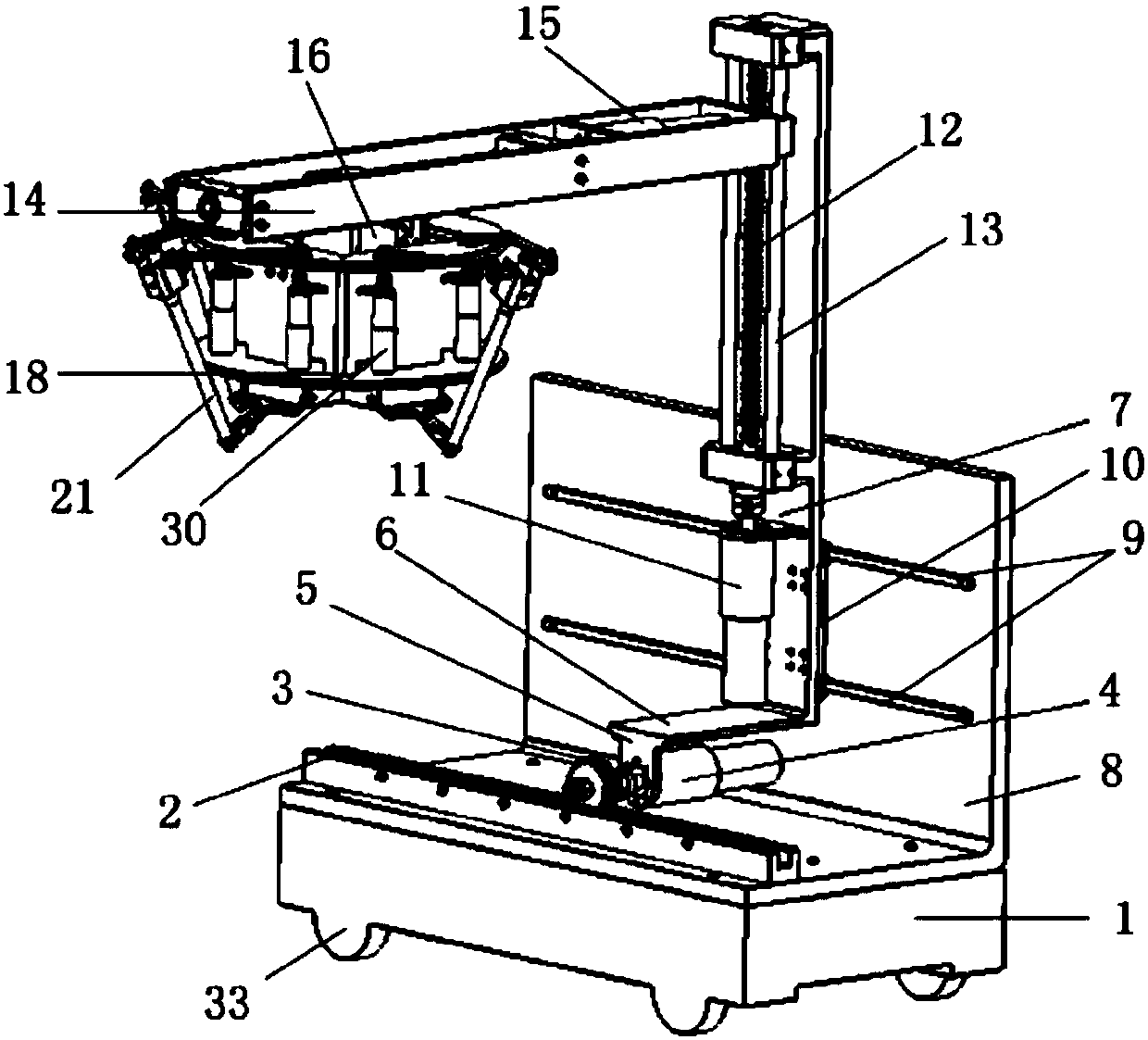
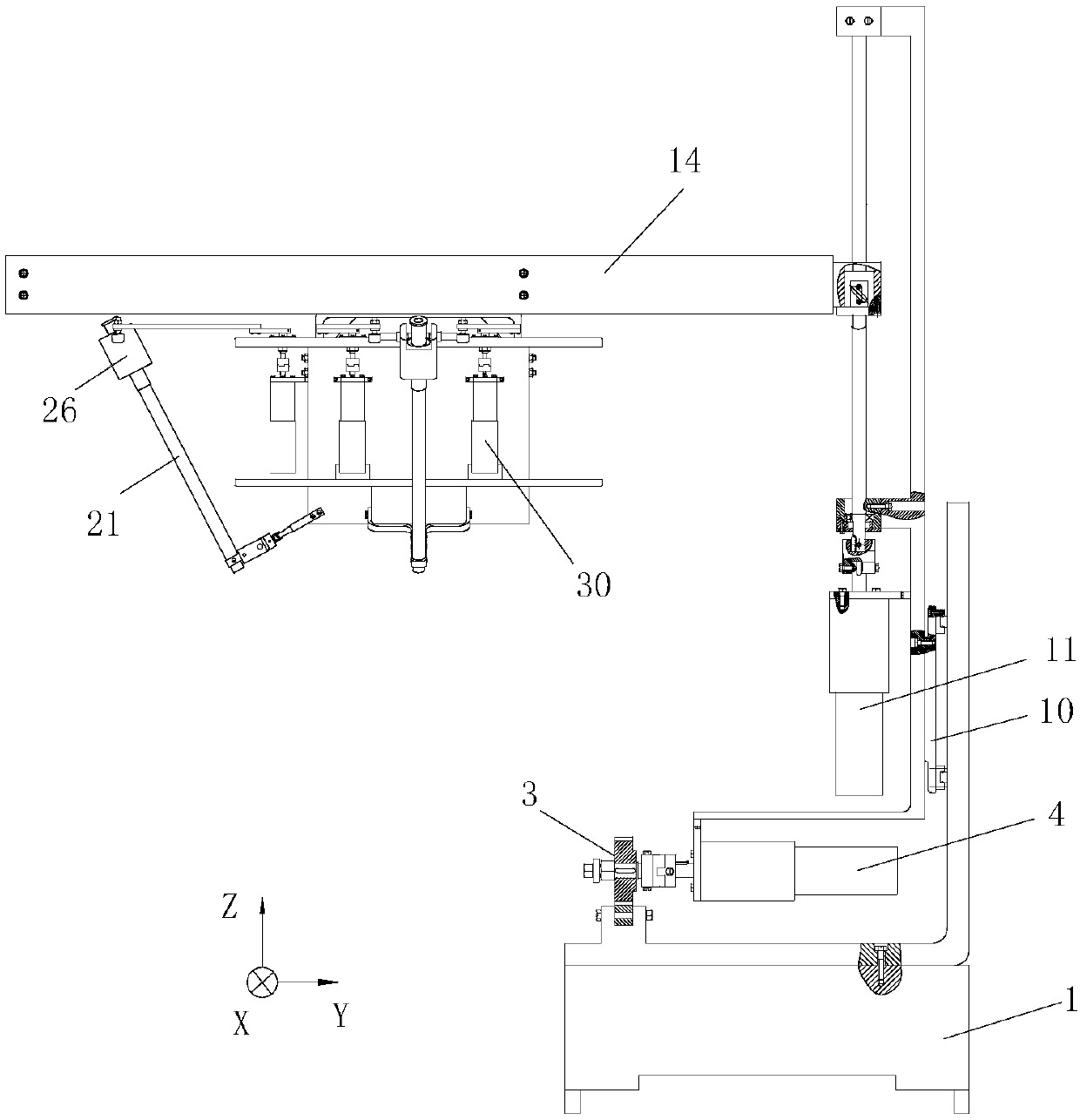
[0029] For the convenience of description, the length direction of the base is defined as the X-axis direction, the height direction of the base is defined as the Z-axis direction, and the direction orthogonal to the plane formed by the cooperation of the X-axis and the Z-axis is defined as the Y-axis direction.
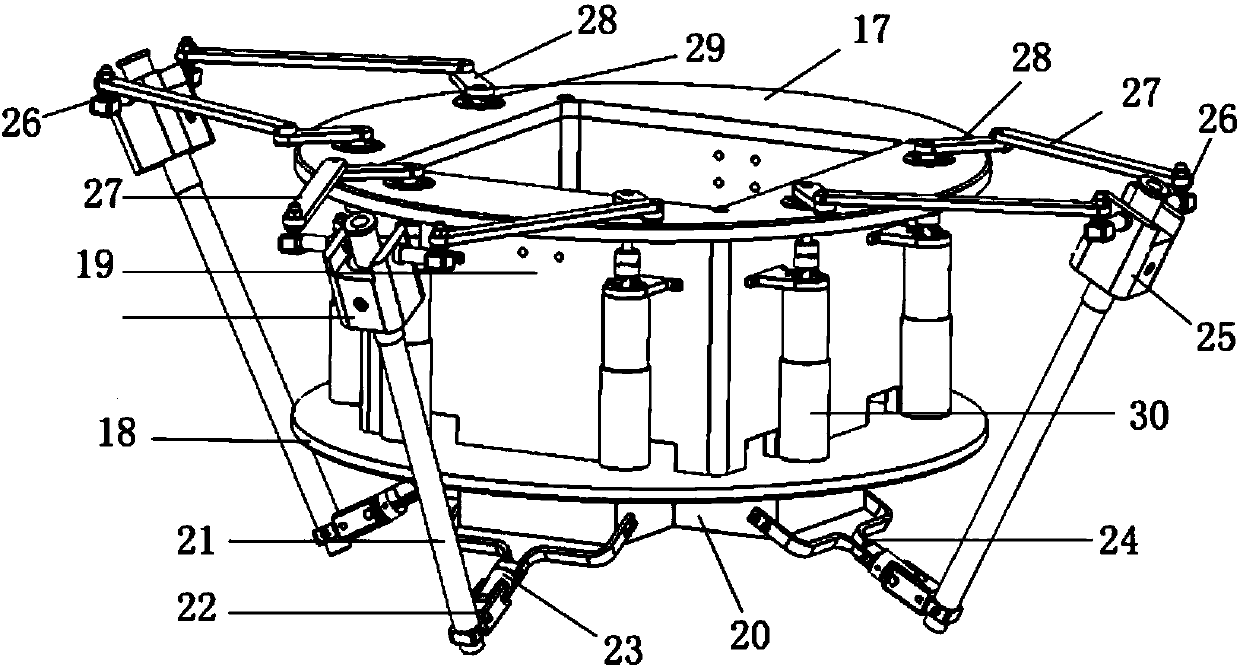
[0030] Such as Figure 1 to Figure 5 As shown, a minimally invasive abdominal surgery robot includes a base 1 and a surgical mechanical box and a drive system arranged above the base 1 . The drive system includes an X-direction translation drive device, a Y-direction translation drive device and a Z-direction lift drive device.
[0031]The operation machine box includes a box body and three sets of surgical devices uniformly distributed along the circumference o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More