

Embedded shape-memory alloy wire actuator driven micro multi-cavity negative sucker
The technology of memory alloy wire and negative pressure suction cup is applied in the field of robots, which can solve problems such as unfavorable miniaturization of adsorption devices, and achieve the effects of improving wall adaptability and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
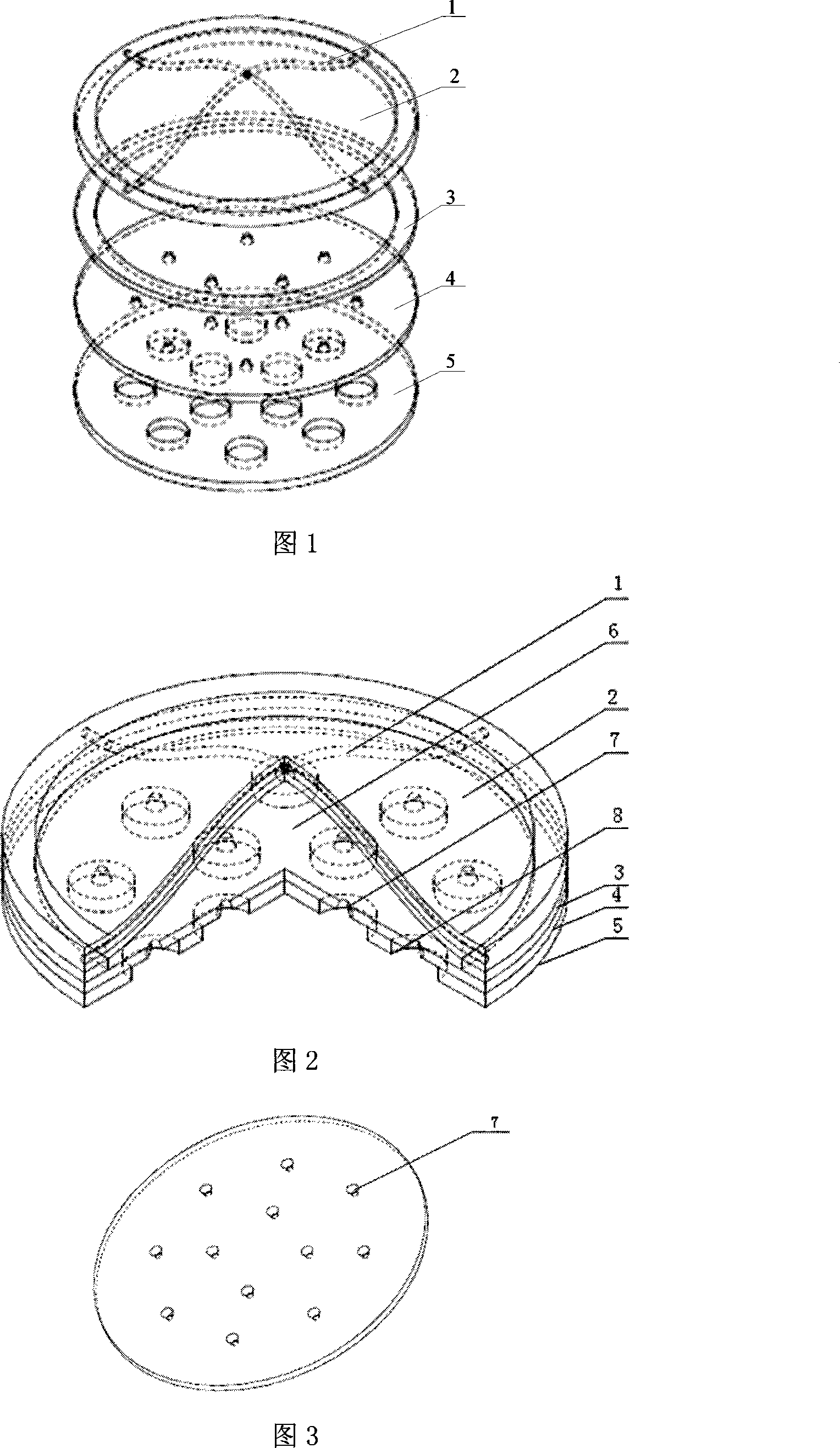
[0017] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
[0018] As shown in FIGS. 1-3 , this embodiment includes a shape memory alloy wire driver 1 , an elastic base material 2 , an elastic body ring 3 , a rigid body support layer 4 , and a multi-cavity elastic body base 5 . The shape memory alloy wire actuator 1 is embedded in the elastic matrix material 2, the elastic body ring 3 is glued to the elastic matrix material 2 on one side, and the rigid body support layer 4 is glued to the other side, and the rigid body support layer 4 The other side is glued to the multi-cavity elastic body base 5, one end of the multi-cavity ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More