Belt wheel changing to holding power under-driven modularization anthropomorphic robot multi-finger hand device
An underactuated, modular technology, applied in the field of anthropomorphic robots, which can solve the problems of too large difference between human hands, insufficient dexterity, and inability to rotate independently.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The content of the specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
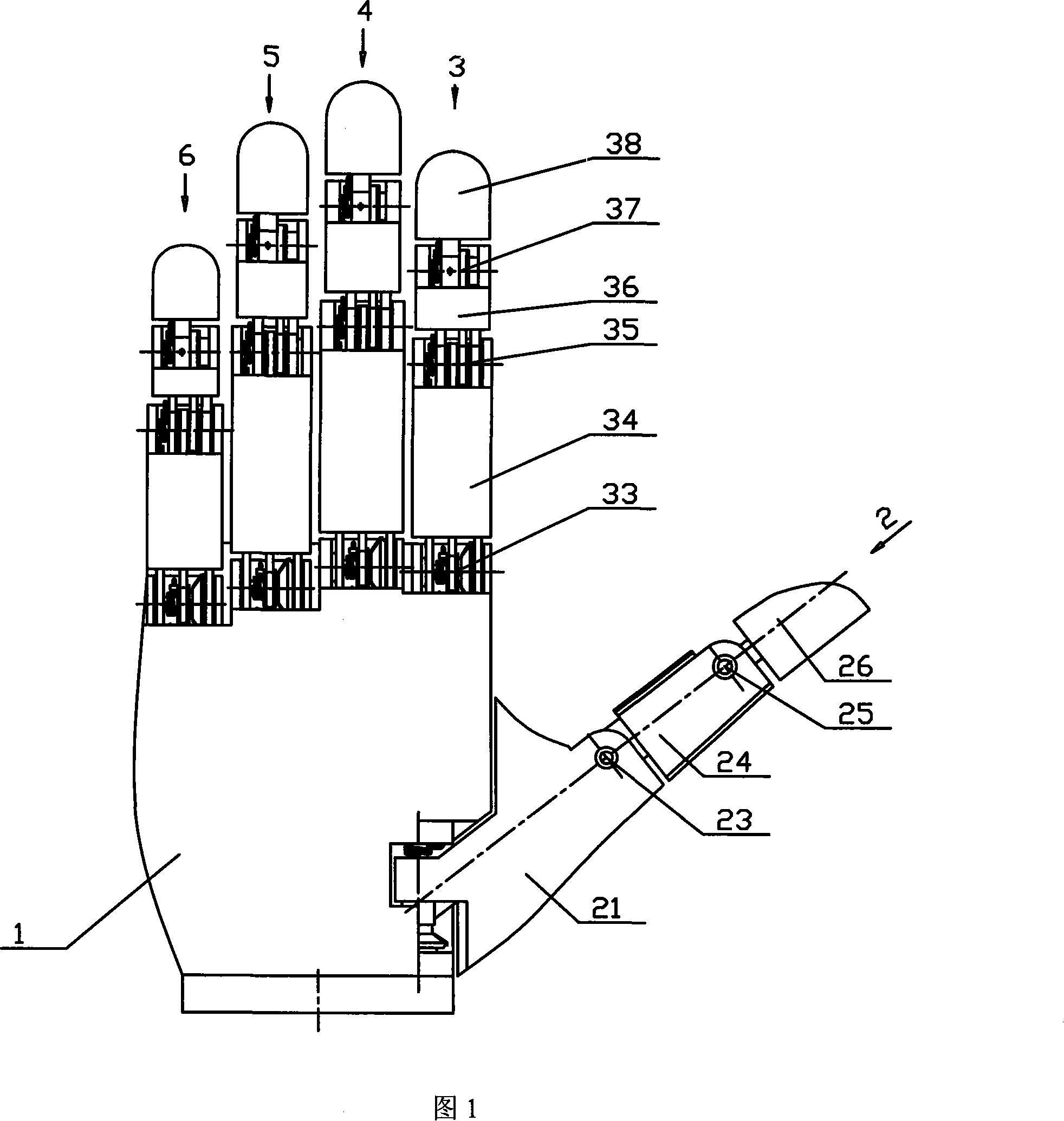
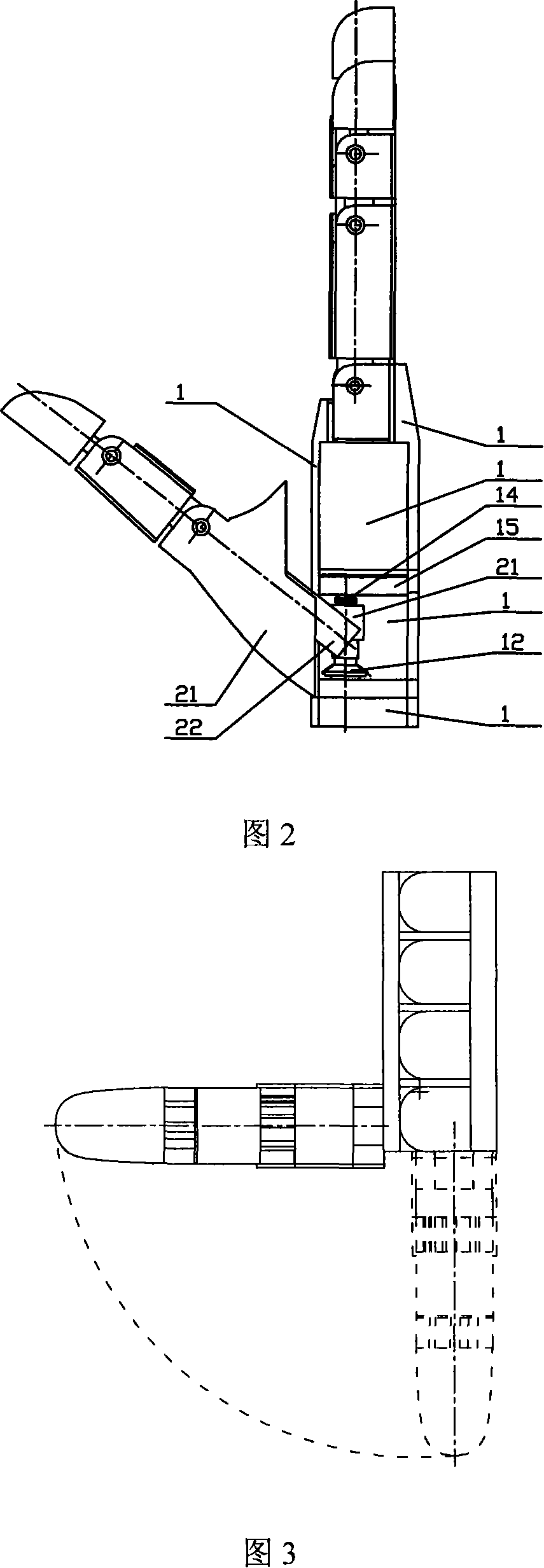
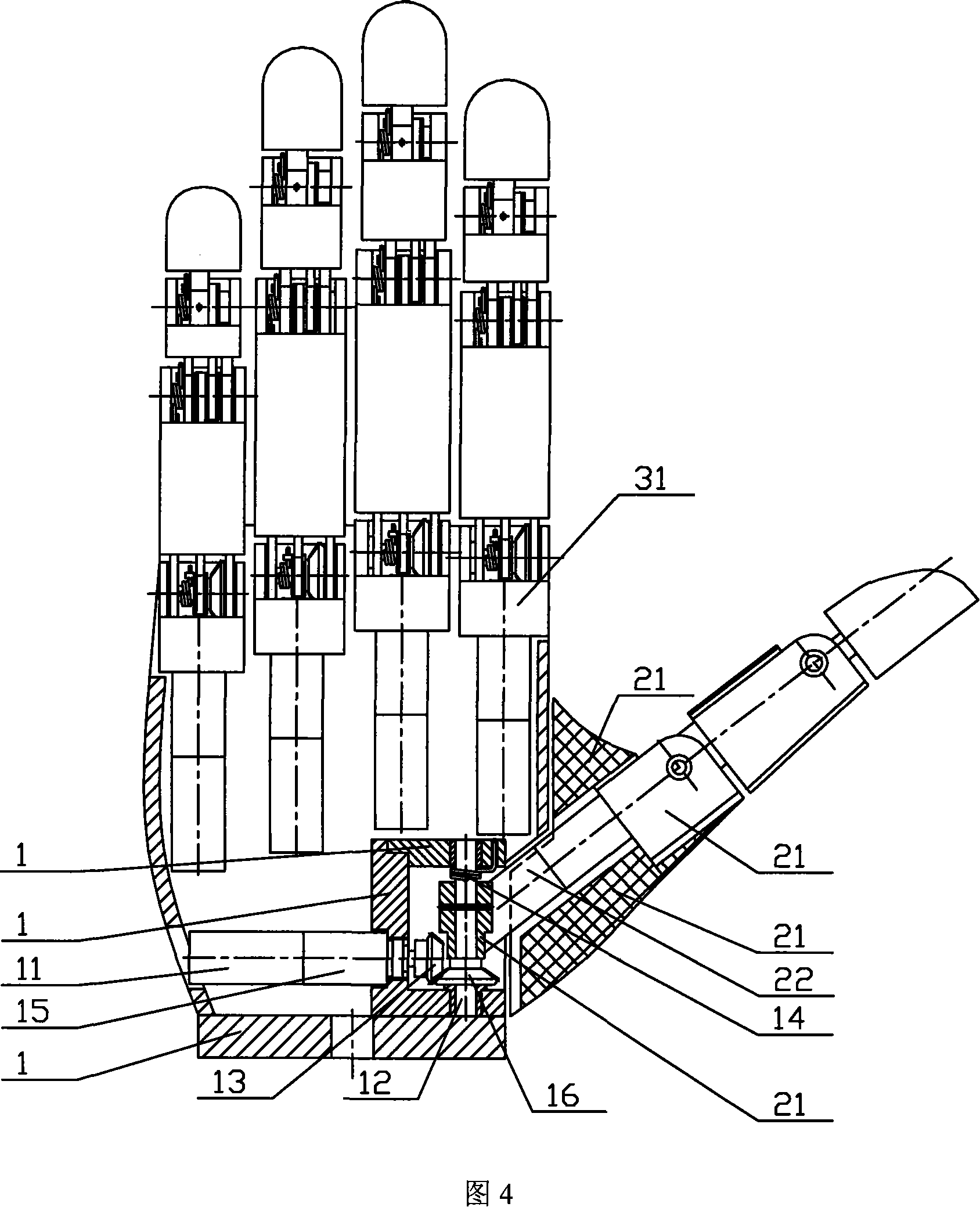
[0054] The appearance of an embodiment of a multi-fingered hand device for an under-actuated modular humanoid robot designed by the present invention is as follows figure 1 , figure 2 , image 3 As shown, it mainly includes palm 1, thumb 2, index finger 3, middle finger 4, ring finger 5, and little finger 6. The partial cross-sectional view of the front of this embodiment is as Figure 4 shown. The appearance and cross-sectional view of the thumb of this embodiment are as follows: Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9 shown (thumb base not fully drawn). The appearance and cross-sectional view of the index finger of the present embodiment are as follows: Figure 10 , Figure 11 , Figure 12 , Figure 13 , Figure 14 , Figure 15 , Figure 16 shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com