Mechanical arm positioning system
A technology of robotic arm and positioning system, applied in the direction of robotic arm, program control robotic arm, manufacturing tools, etc., which can solve the problems of encoder position lag and cumulative error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The present invention will be further described in detail below in conjunction with the accompanying drawings.
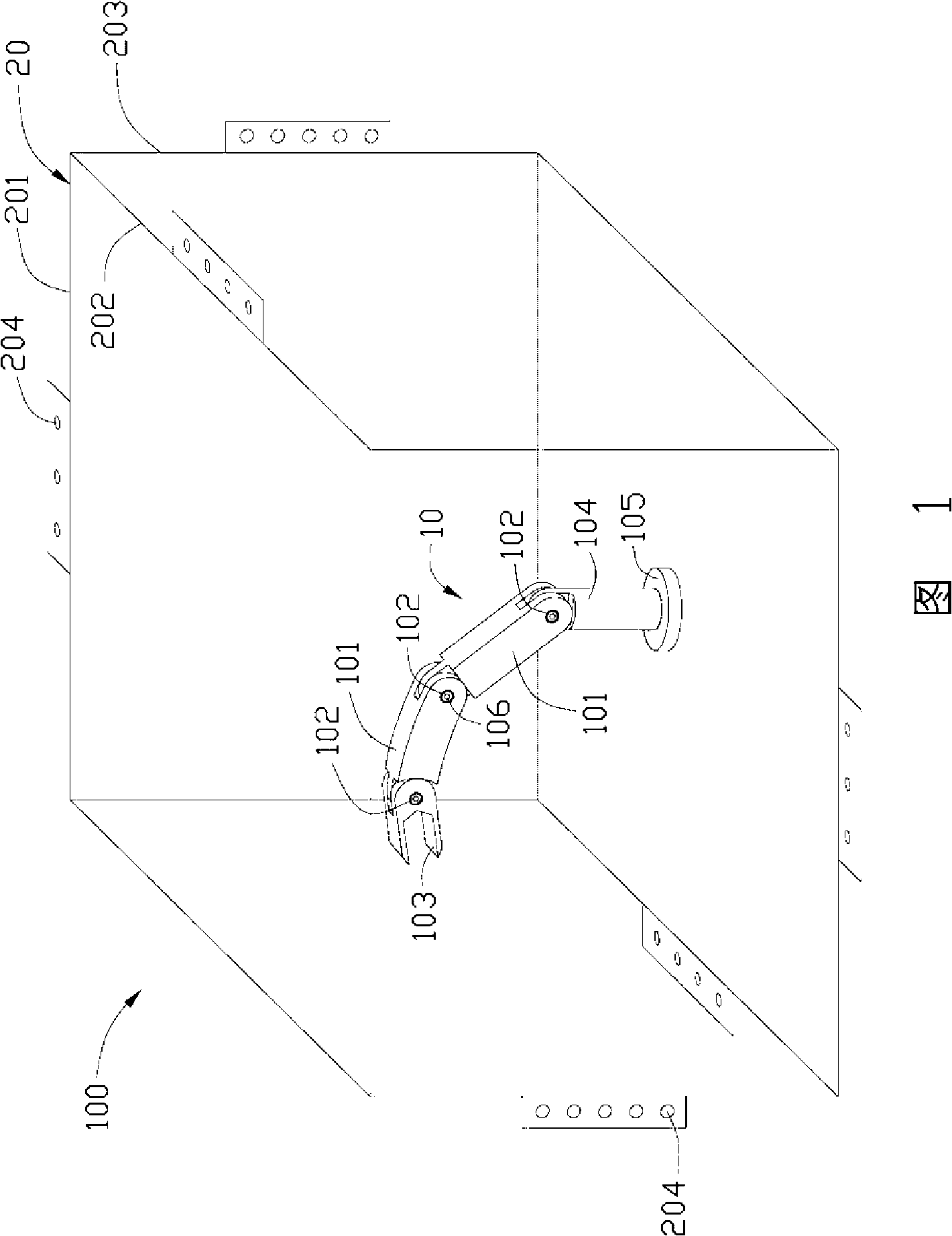
[0010] Please refer to FIG. 1 , a robotic arm positioning system 100 provided by an embodiment of the present invention includes a robotic arm 10 , a cube-shaped support 20 and a signal processing system (not shown).
[0011] The mechanical arm 10 is a mechanical arm that can move within a predetermined space. The mechanical arm 10 includes two arm parts 101, a rotating shaft part 102 and a clamping part 103, the two arm parts 101 are connected by a rotating shaft part 102, each arm part 101 can rotate around the corresponding rotating shaft part 102 .
[0012] The clamping part 103 is used to realize the grasping action of the robot arm. In this embodiment, the gripping part 103 is configured as a jaw, and its two jaws can be opened and closed to realize the gripping action of the robot arm. The clamping part 103 can be set in different styles according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com